We followed the setup steps in Arducopter and it has been flying reasonably (could be better in loiter) for about 10 hours.
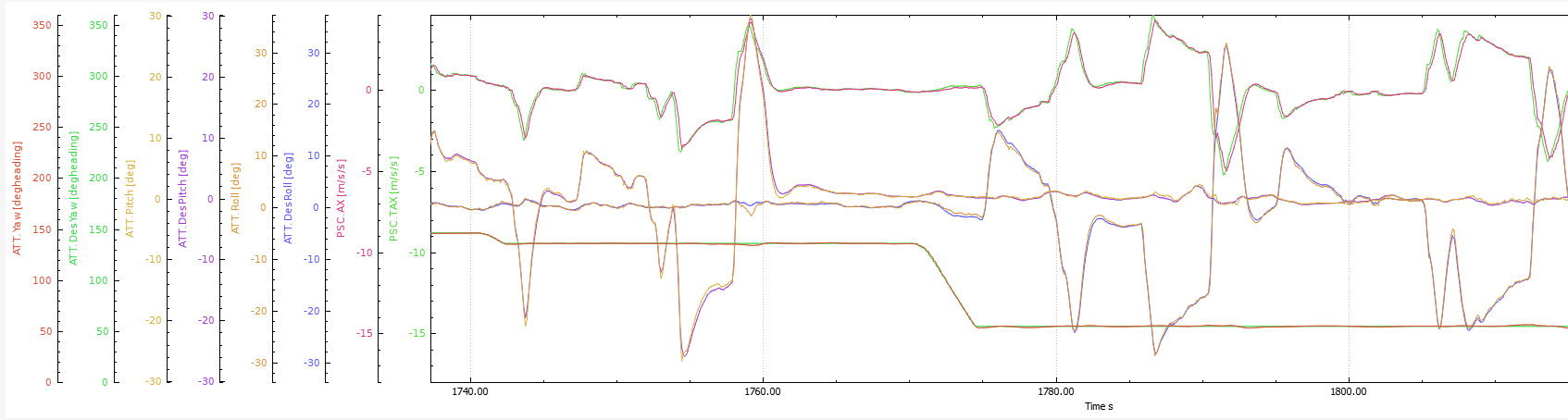
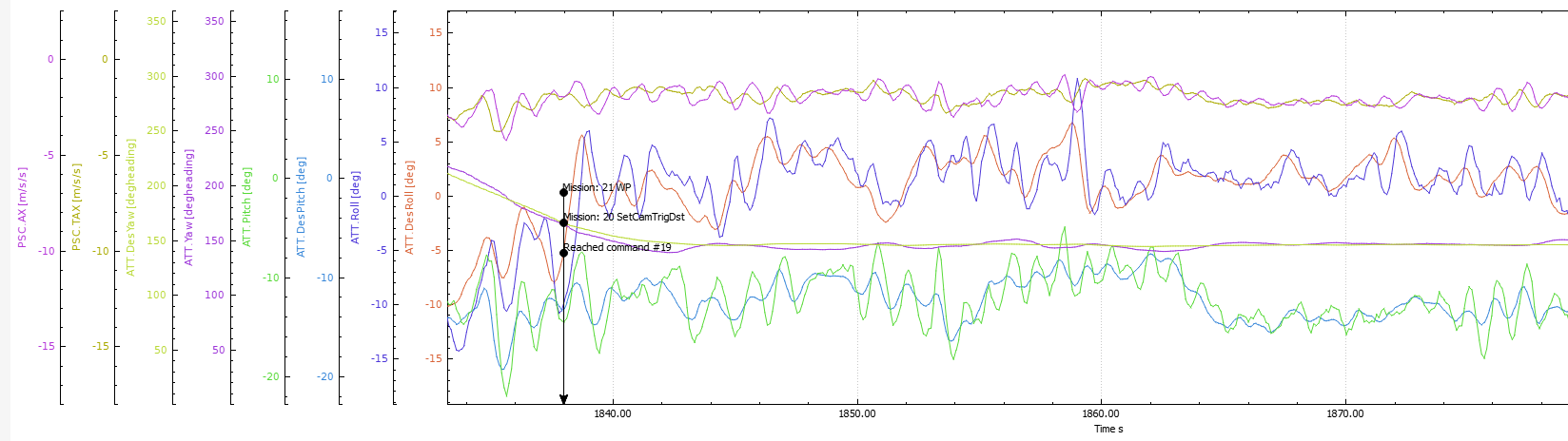
However during a reasonably challenging survey in mountain ranges using terain following, we experienced a strong yaw to the left with the error message "potential thrust loss (5) and followed by an over correction to the right "potential thrust loss (3) , nearly 90 deg both ways. There was also a marked drop in height of about 5 m whilst the reported faults occured.
The wind was reasonably strong from the south of maybe 10m/s and the down wind attitude was quite level to fly at 6m/s.
The fault occurs at 9:23:05 in the timeline.
Its a scary thing to see happen especially when it looked fine for some time.
Could severe turbulance / downdraft have caused this?
Are the (5) and (3) numbers actually the motor arm numbers?
The MOT_THST_EXPO is currently set at 0.82 as this is what is recommended for these propellers using ardupilot setup.
Since the incident we have ensured that the follow params are set:
Set, BRD_TYPE == 3
EK2_IMU_MASK == 7
(or EK3_IMU_MASK == 7 if using EKF3)
INS_USE == 1
INS_USE2 == 1
INS_USE3 == 1
The only difference during flight was that the EK2_IMU_MASK was not set to 7 (now is) but could this be the cause of the incident?
I understand that vibrations are quite high and we are working on reducing them but it is difficult as it carries a petrol generator.
The actual thrust loss events, something caused heavy yaw, which was tried to counteract by the motors, unfortunately your copter is not powerfull enough to have enough lift when quickly yawing. (Or have not tuned correctly). Set all parameters again and do an autotune.
I wouldn’t call posting in the Ardupilot forum and the Cubepilot forum cross-posting. There will be many people here w/o Cubes that have valuable advice to give.
Thank you @Eosbandi very much for investigating. I really appreciate it.
I haven’t completed autotune on the GAIA as I was unsure as to how it would behave as it is such a large multi rotor so i tuned as best as i could manipulating the PID controls and extended parameters through mission planner.
I see your graph of a very well tuned GAIA and am assuming you have a GAIA and have successfully completed auto tune on the aircraft. How did you perform this and what parameters would you recommend changing if any to prevent any incidents occurring. Any information would be valued.
Also, I don’t think that rubber blobs are adequate vibration dampening for a two stroke engine (even if the manufacturer claims it) I would go with some wire rope dampeners instead.
It is worth keeping in mind that the U8 is a very efficient but very low torque motor indeed, and as such when flying in difficult conditions you can experience dropping steps, or is extreme cases a total desync leading to the motor locking up. If your drive drops steps, and this happens most commonly during hard yaw moves but can happen if the aircraft experiences severe disturbance from something like a strong gust, the result is pretty much exactly what you have reported, and in a more severe case the aircraft will simply flip and crash. As a long time manufacturer of large multi copters I have to say we stopped using the U8 (and the KDE 7208 equivalent) a long time ago for this very reason.
My advice to you is to upgrade to more powerful, higher torque motors, especially with the size of prop you are driving, accept the higher weight and reduced efficiency, but have a system that is capable of managing a much wider range of conditions. We have learned this the hard way, and using a motor like this based on the great looking numbers on a manufacturers performance chart is a bit if a novice mistake, that will eventually catch you out.
I am sure some will disagree with this, and the U8 (and KDE 7208) are very efficient in good conditions, but they simply do not stand up to ‘real world’ use where you may have to fly in conditions that are far from perfect.
FYI, check you motor outputs in the logs and see of you get a very short throttle spike on one or more motors during the incident. If so this is almost certainly dropped steps in the drive.
Hi Paul,
Very difficult to make recommendations as much depends on the nature of the operations you are undertaking, and also what you mean by a ‘Heavy platform’. I am not sure it is appropriate for us to make recommendations here, in essence however you need a higher torque motor, and the torque of the motor is mostly governed by the amount of metal in each stator core, so a larger stator (and therefore a higher motor weight) will normally be better. I expect even moving from a U8 motor to a U10 would help (8mm stator height to 10mm stator height), but we have not used this particular motor enough to give you any real insight into how well it works. Remember that it is not just the motor, but the ESC, prop, operating voltage and the tuning within the flight controller that governs reactivity. We are really only discussing motors here, and ONE of the main governing factors for the capabilities (and limitations) of a motor are the stator dimensions (diameter and depth).
Thank You very much @Xelax Xelax and @Eosbandi . i had the same problem. Thanks to you, I understood the problem clearly.
QuadCopter
6515 Eagle Power Motor
2265 Propeller
22000maH Tattu Plus Lipo
70A Red Brick ESC
5000gr useful load
The system feels very heavy compared to the thrust.
However, the tool can be ventilated with 30% gas. Doesn’t that mean it’s strong?
It makes this error when the battery level is low.
However, theoretically it should have been very adequate.