Issue: Motor spin corresponds to the throttle input with no props mounted on the quad. RPMs for all the motors rise quite even to each other to up to 12600 rpm approx. with full throttle [(HUD) - (Movie)]. With props mounted on the quad, the motors spin does not correspond to throttle input. RPMS increase to a maximum of about 2400 rpm approx., with full throttle with each motor showing different RPMs [(HUD) - (Movie)]
@dkemxr@amilcarlucas - Thanks for the prompt responses.
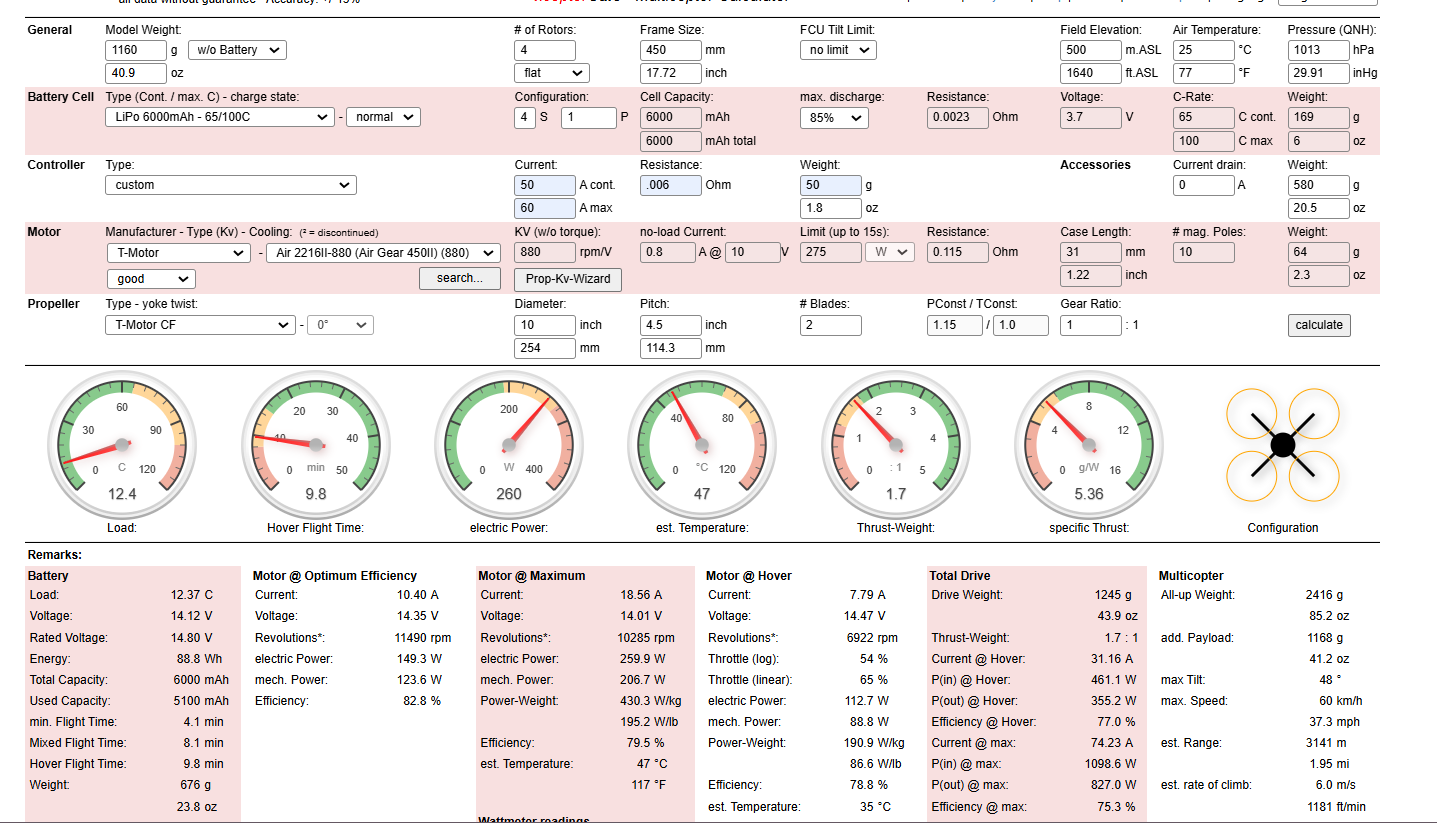
My apologies, I sent the wrong eCalc. Below is the correct eCalc. The weight without the battery is 1160 g (battery wt. 580 - total weight 1740 g)- . Given that eCalc may be off by +/1 15%, do you think the quad should fly?
And here is something critical that I forgot to mention. If I keep the battery connected to the FC but disengage it from the quad and let let it rest on the floor while connected to the drone to supply power, such that battery weight does not matter any more, the motors still spin to up to 2400 rpm with props on and up to 126000 rpm with props off. This is something that I need your help to understand. Here is the video with full throttle, no battery weight, and props on. Why do props cause the rpms to be stuck at a such a slow rate?
It’s still wrong. Put the total weight (take-off -weight) in Model weight and use “incl drive”. Then in the bottom section under Multicopter it should show the correct All-up-Weight. You want the "Motor @ Hover> Throttle(linear) to be 50% or less.
Thanks @amilcarlucas and @dkemxr ! I obviously need to read up a lot . And I promise to keep learning to keep Dementia away, hopefully without making myself a nuisance to both of you.
The mystery that I am trying to resolve (and apologies in advance if I am belabouring the point) is that even though the battery weight is not a factor, reducing the weight of the copter to 1160 g, with the props on, the copter does not fly at all. This is certainly a gap in my knowledge which I need to contemplate based on @amilcarlucas comment. I will work on that, merci!
@dkemxr - Thanks kindly - Added 1760 in Model weight and removed weight under accessories.
You were both right, linear throttle is way high at 72%. Now need to bring the model weight down.
Any suggestions for a 450 mm configuration for 10-12 minute flight time would be deeply appreciated. Obviously a lighter frame would help. I am researching as well.
I don’t know how you arrive at that. With that bit of kit I see 54% so it’s a bit overweight/underpowered but it should take-off. Have you connected to BLHeliSuite and check to see if Low RPM Power Protect is disabled?
Merry Christmas @dkemxr and 2 for 2! You were absolutely right. Low RPM protection was on. Connected via BLHeli suite and turned it off. Props spinning normally. Mystery resolved. Looking forward to setting up notch filter and testing it during my winter vacation. Will keep all posted.