So during a testing flight today I have a weird issue that I thought was caused by my ( fence parameter) But i disabled the fence and tried again and had the same error. ( potential thrust loss 1,2,3,) This has only ever come these two flights. It was not visible in flight just the warnings. Any input is appreciated.
Drone
Quad
Vertiq 40-06 370kv motors w/esc
15.5 kde tri-prop
Cube Orange +
6s 20kmah li-ion
Total weight 4kg
This doesn’t make sense to me, due to this being the 5th one of these that I’ve built with the exact same configuration, and parts. None has ever given the warning or this issue. The other 4 have numerous flights and hours on them with no issues.
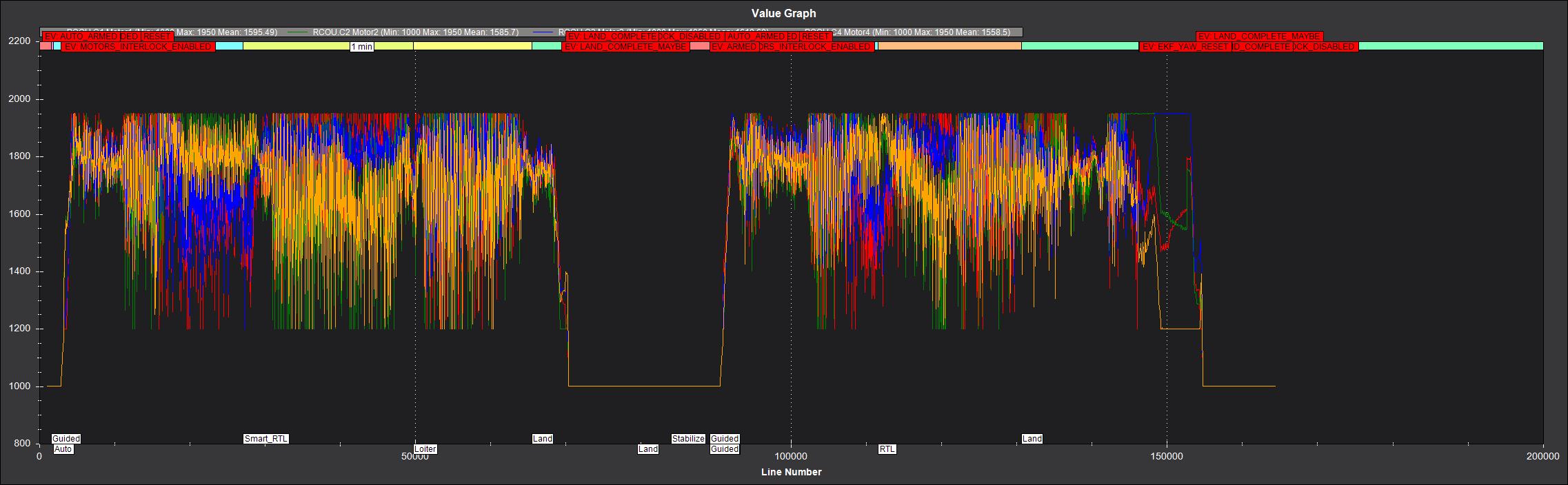
By all measure this craft is in bad shape. Oscillating outputs hitting max, Severe Roll oscillation, Rate outputs off the chart, a large battery sag under demand (3 cheers for Li-Ion).
you have one external GPS or two GPS?
GPS_GNSS_MODE2,67
GPS_TYPE2,0
any reason why you disable them?
COMPASS_USE2,0
COMPASS_USE3,0
15" propeller? if yes, ATC_RAT_PIT_FLTx, ATC_RAT_RLL_FLTx, 15
PSC_ACCZ_P,0.26 = MOT_THST_HOVER
MOT_THST_HOVER,0.5602491 is a bit not ideal. like under power based on my experience. 4Kg, 15.5" propeller, hmm, under size?? something is not correct. each arm needs 1kg thrust x 2.4 times. you may have to go back to the motor chart or something is not secure properly. Looks like you can have max 2.6kg drone.
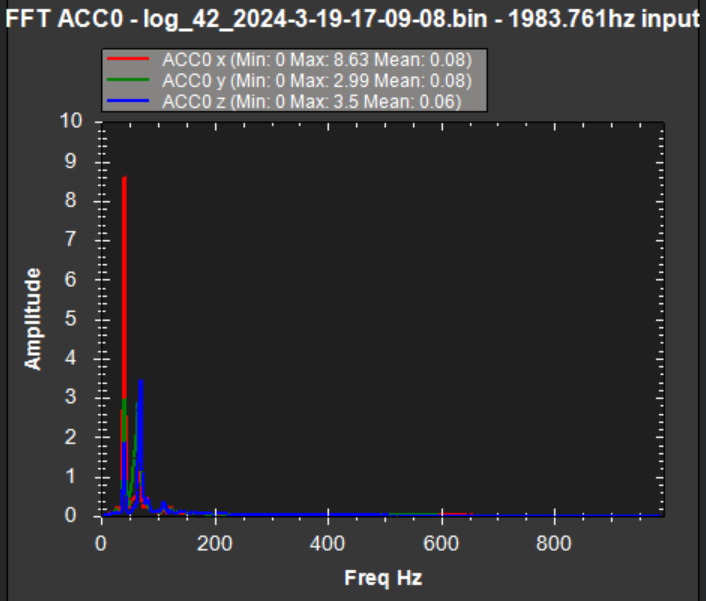
Noise is still high.
INS_LOG_BAT_MASK,1, why 1 and not 7? Cube Orange +