This is an analysis of an occurrence of Potential Thrust Loss warnings I received yesterday. I’d appreciate any comments regarding this incident. Thank you.
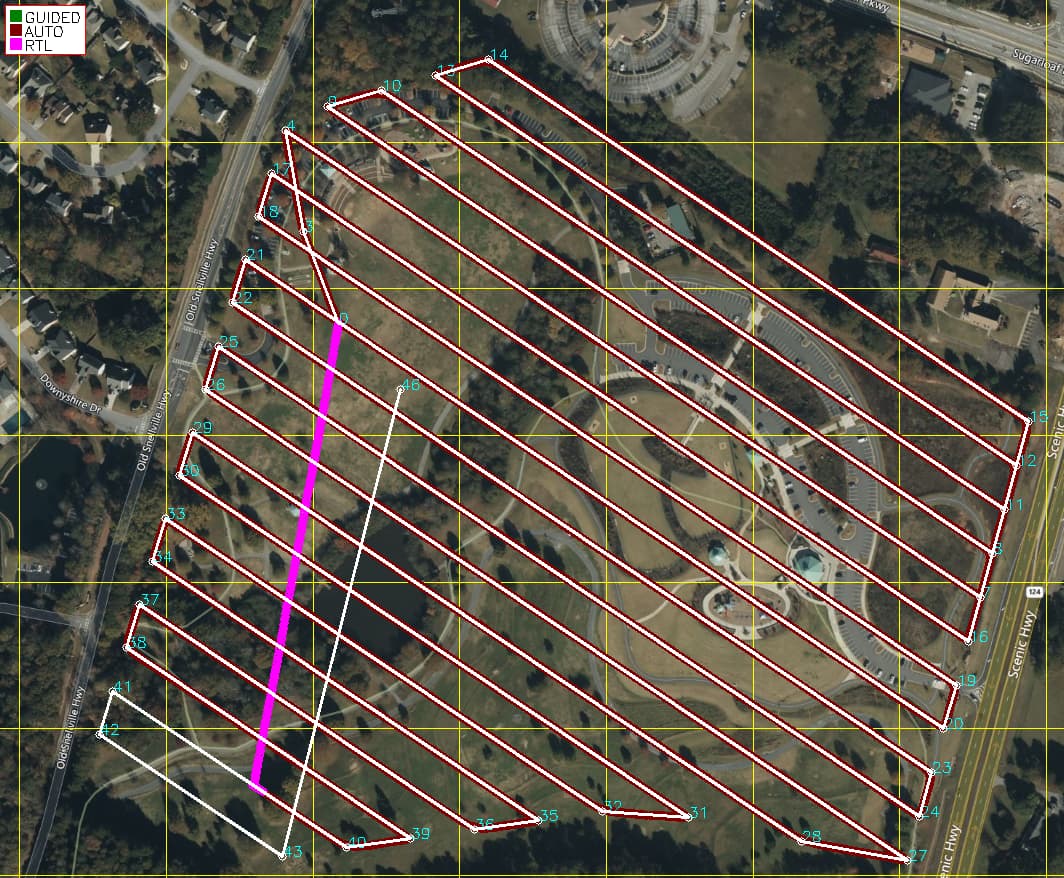
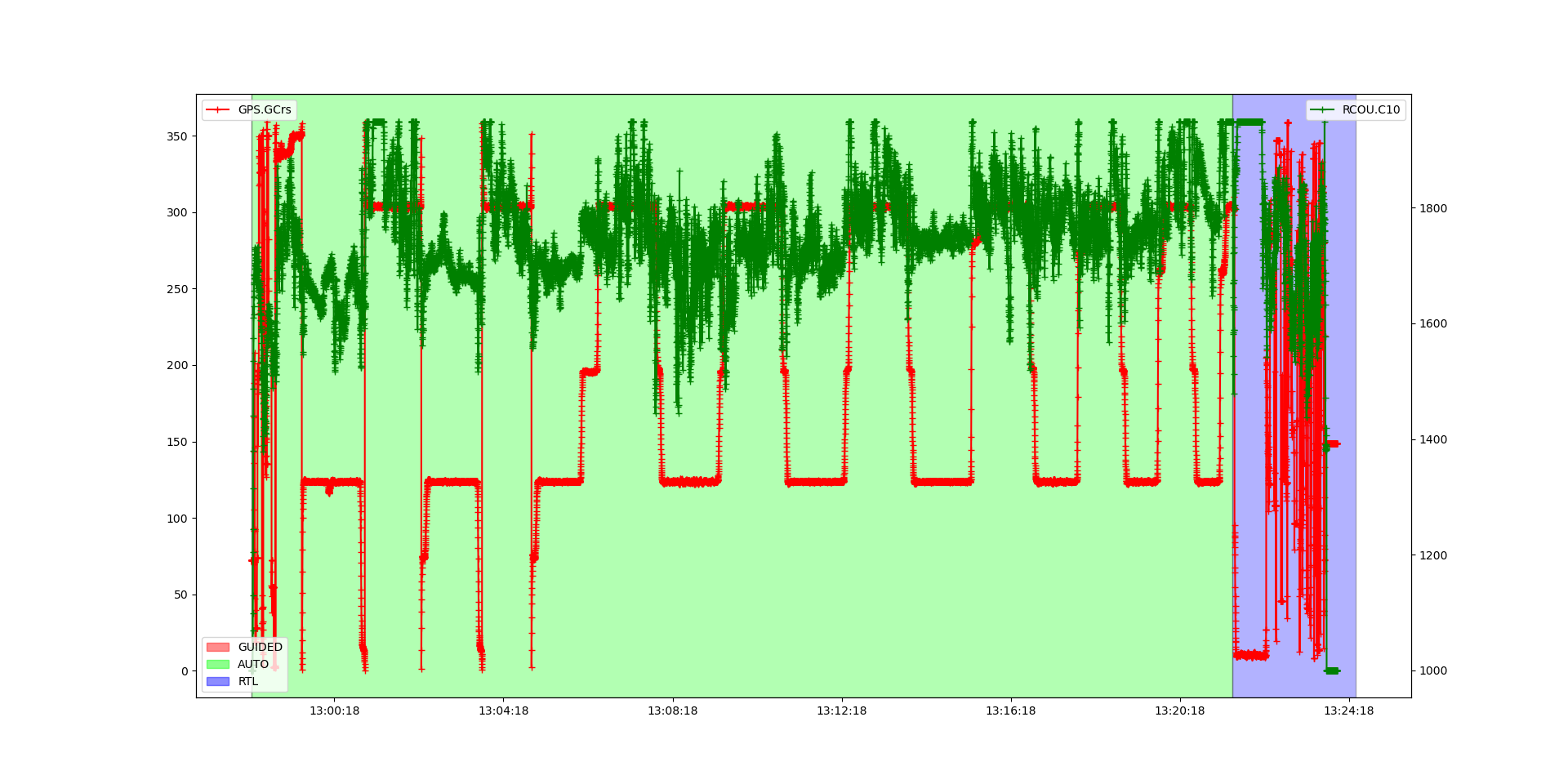
Yesterday, I flew a photo survey mission planned for 30 minutes.
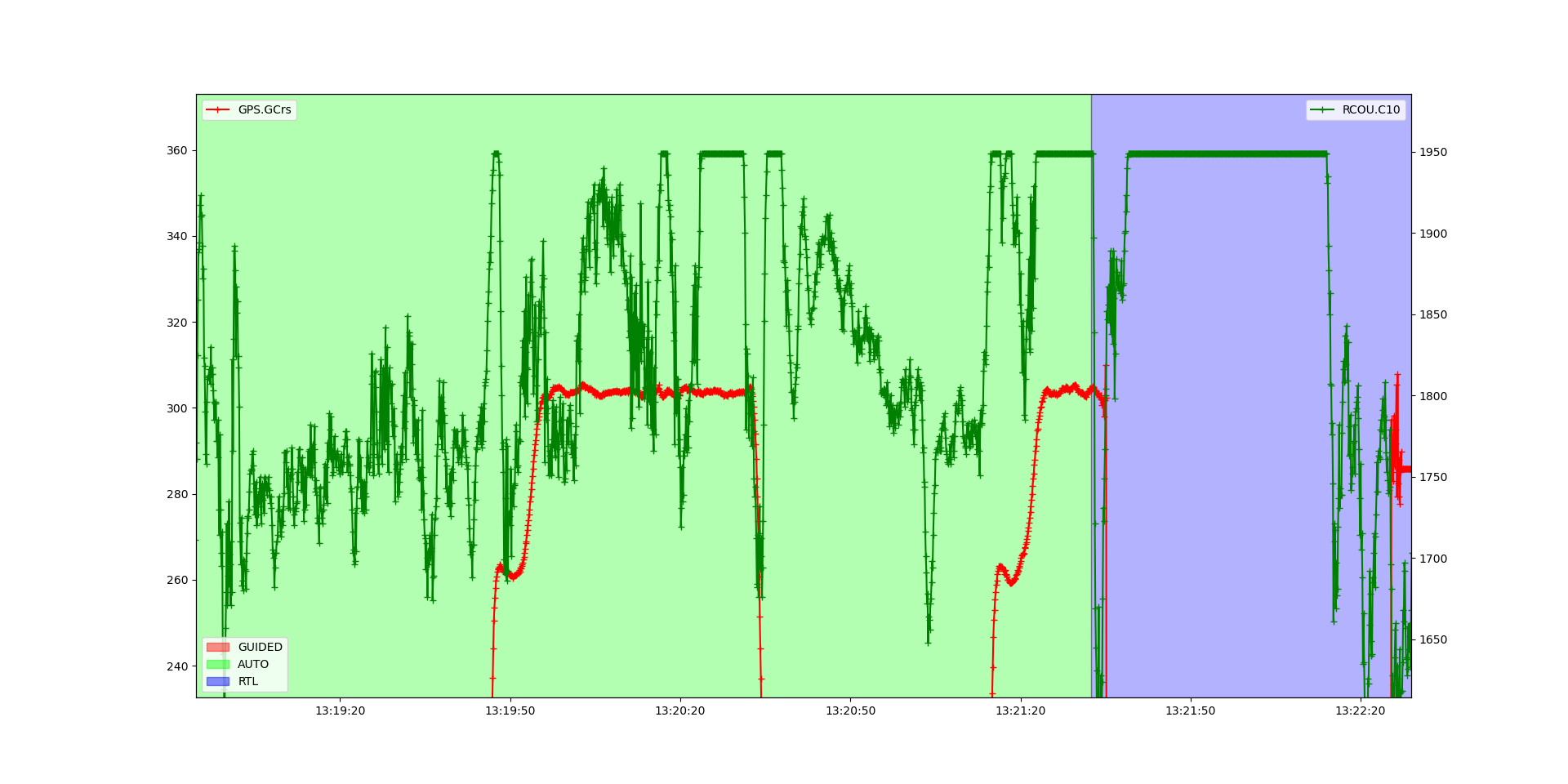
About 25 minutes into the mission I received two “Potential Thrust Loss” warnings - so I aborted the mission with a RTL.
This “Potential Thrust Loss” warning occurs when the flight controller commands maximum power (PWM 1950) to a ESC/motor but the motor thrust does not achieve the aircraft attitude the flight controller is seeking. This condition can lead to loss of aircraft control and a crash.
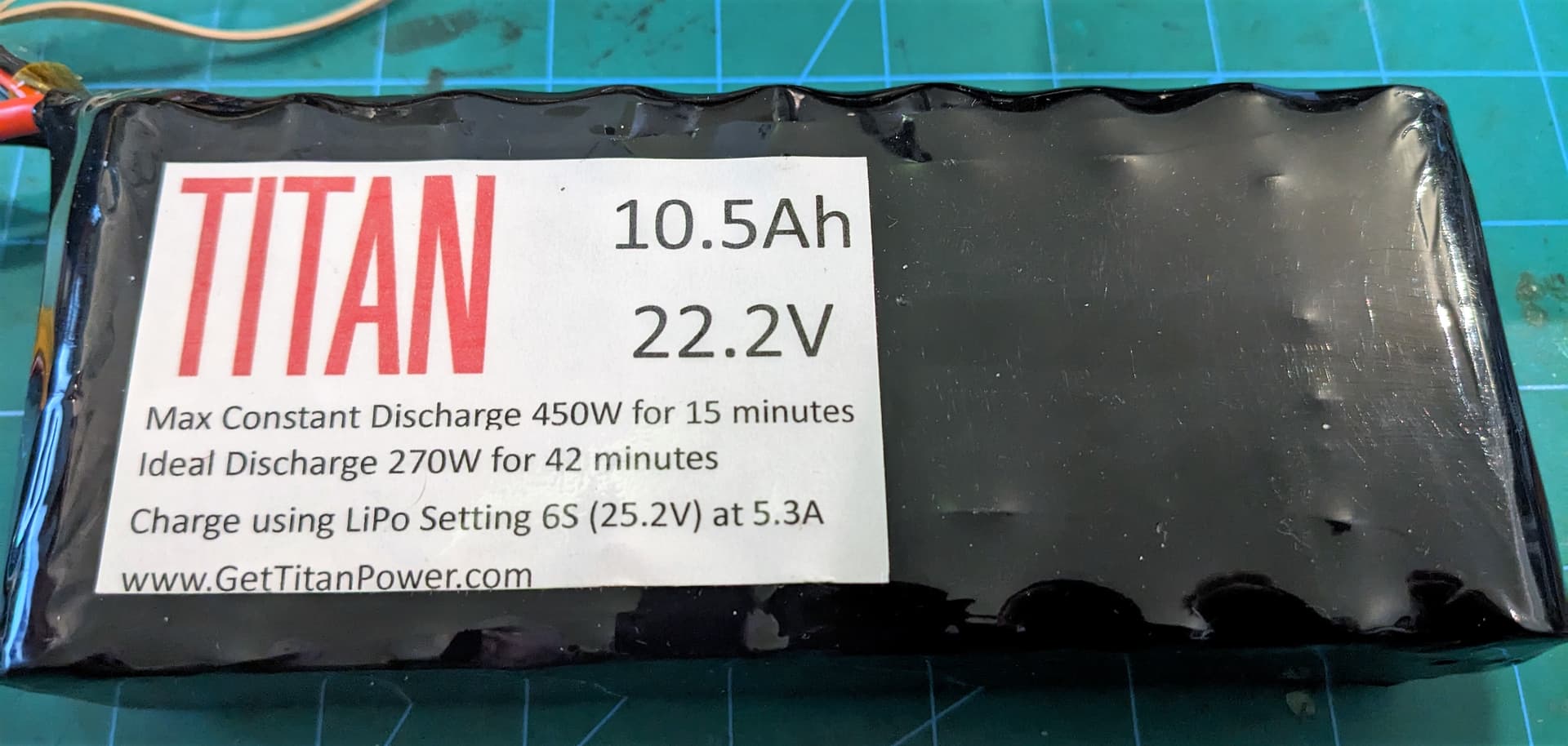
The copter is a 650-class copter. The ESC is a 4-in-1 using BLHeli_32. The battery is a 6S2P 10.5 Ah Li-Ion.
The flight path rows were aligned with and against the prevailing wind - evident by higher amperage and higher RC-OUT when travelling up wind - about 300 degrees.

The low voltage failsafe (18.6V) had not yet tripped (due to the 10 second timer parameter,) but there were dips below the 18.6V failsafe.

After landing, the resting battery voltage was 21.15V. Upon recharge, only 6.5A of the 10.5A had been discharged.
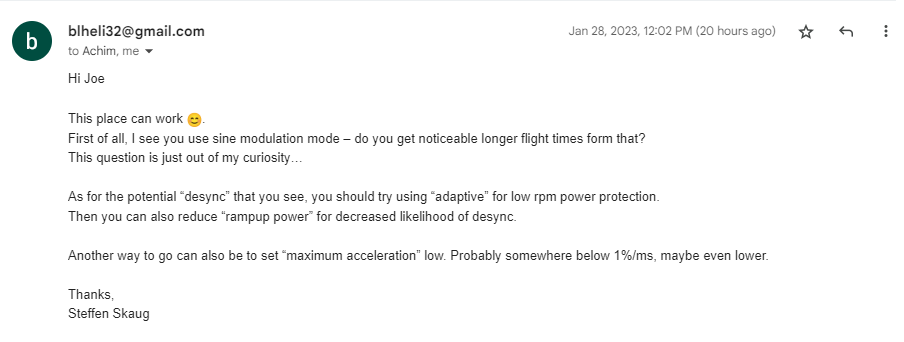
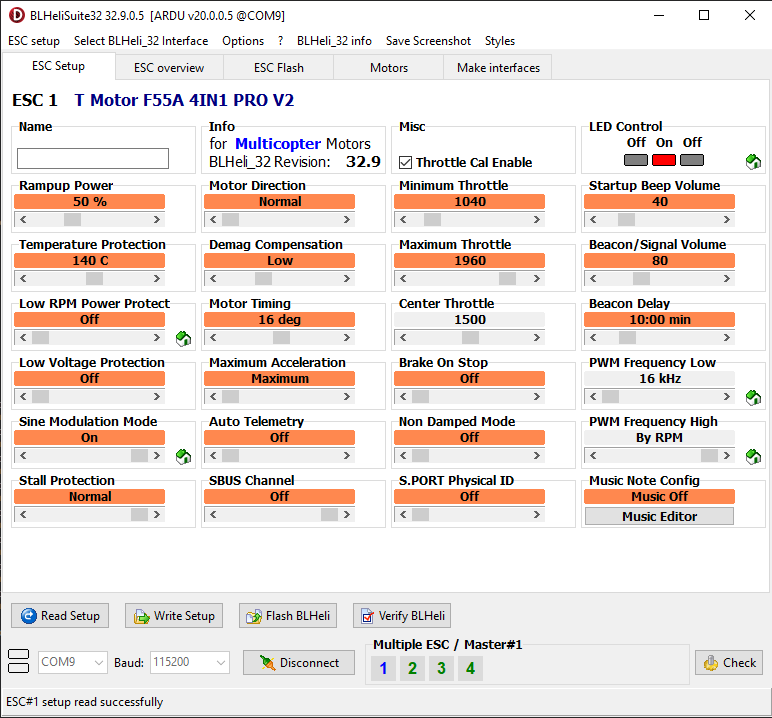
My initial thoughts were that somehow my BLHeli_32 configuration wasn’t enabling enough power to the motors in low voltage conditions. While this still remains a possibility, I no longer think it’s a factor. Here are my BLHeli_32 settings - I’ve reached out to the BLHeli_32 support community for their thoughts and input.
The battery’s label lists specs for “Ideal” and “Max Constant” discharge rates - 270W and 450W respectively.
Graphing the wattage for this flight, the discharge rate is quite high - continuously exceeding the 270W ideal level and getting to peaks of over 500W.
I compared this to a similar 20 minute flight in calm weather - and the wattage in calmer winds is consistently lower - and close to the “Ideal” 270W.
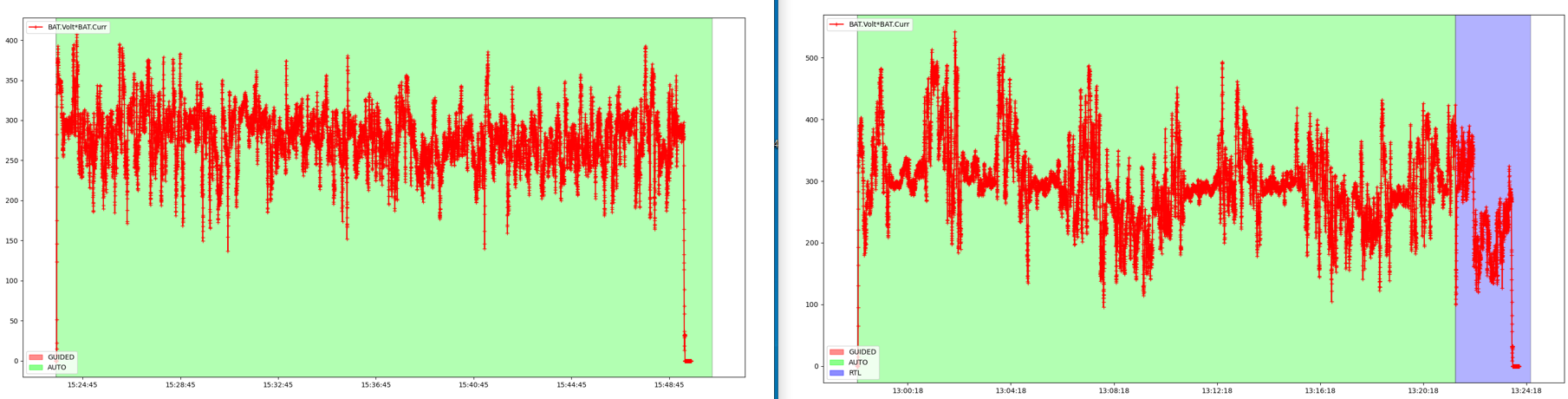
It appears that the low voltage delivered at high wattage loads do not allow this copter to maintain full motor authority in windy conditions.
Flying survey rows cross wind may alleviate this - but I expect for maximum duration with this battery, calm winds are a requirement.
The Li-PO battery I have for this copter is 8.0Ah. Although it’s about 200 grams heavier than the 10.5A Li-Ion, it’s likely to deliver much more than the 6.25A that the Li-Ion was able to deliver in these conditions.