Hello, I am making heavy lifting hexacopter with hobbywings x8 motor. its recommended MTOW is 44kg and i am operating within 35-40kg. It was working fine in agriculture setup with jiyi flight controller. when i use pixhawk, i am getting so much of voltage sag and potential loss error time to time. It result seems to because of payload exceeding the MTOW, but i have flown this drone with this heavy payload with jiyi flight controller since long time…can anyone help me to figure out the issue. This is my log file
https://drive.google.com/file/d/1I2QOyiBMnBoP5nQh_6rmvMgbasWmr_5F/view?usp=sharing
There is a very heavy yaw imbalance. Maybe some motors got twisted during transfer to Pixhawk.
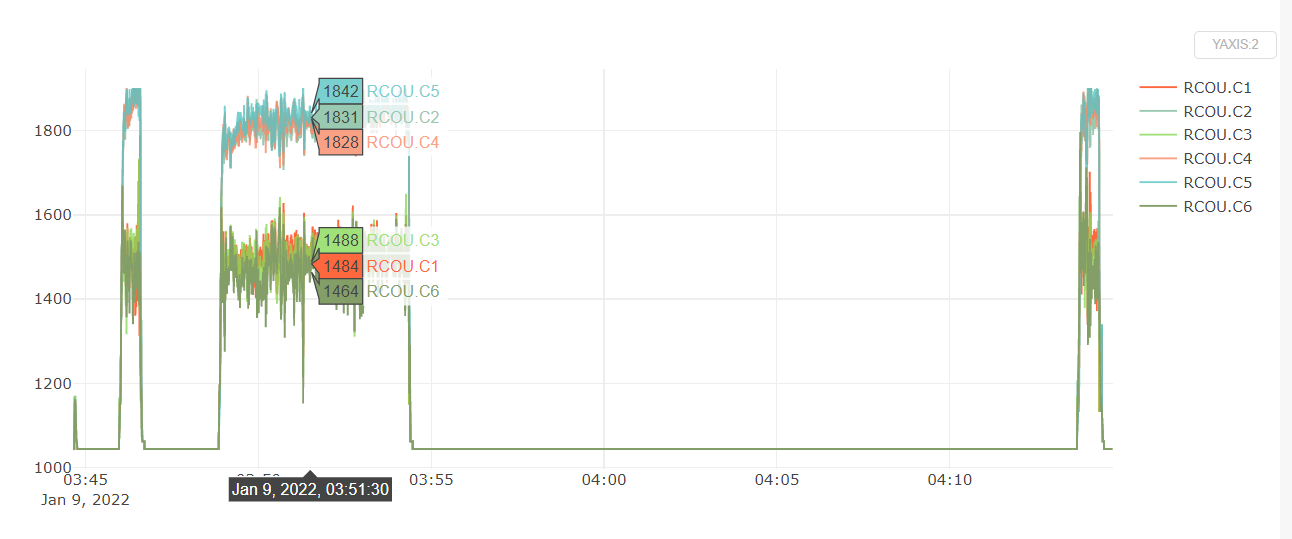
You can see here motors 2, 4, and 5 are running much higher (near 100%) than motors 3, 1, and 6.
Motor 5 is the highest by a bit and is maxing out several times - thus leading the autopilot to think that there is thrust loss on that motor.
Thanks for responding, Motors were not that twisted, its 1-2 degree which was already on previous setup, I have adjusted it and i will test it today… Did you find any other problems?
if all the motors are level then the only other things I can think of that would cause an imbalance like that is you have somehow recalibrated half your escs by mistake causing different throttle ranges.
I assume the propellers are all on the correct way none are upside down or anything like that?
why do you not have a current sensor connected? I only see voltage.
how long ago was the battery used with the other flight control system? Is it possible it has degraded or became faulty since? the voltage drops 4v on takeoff, that is a lot.
Does, changing MOT_THRUST_EXPO, MOT_THRUST_HOVER and other parameters for propeller size, helps for providing required thrust?.. i noticed i have used default expo
Yes sir, all propeller are leveled. The battery i am using now has been used for 5-10 cycles only…I am using 4 herewin 6s 12000mah battery, 2S,2P
I don’t have power module with current sensor to sense such large current, its holy bro PM v2, so i have used for powering orange only
what motor controllers are you using? how are the batteries wired to them? are the batteries all joined together or are some batteries connected to some controllers? are you sure all the controllers are getting 12s? if you had half in series and half in parallel so half the motors were getting 6s and the other half getting full 12s were holding it in the air it would explain the strange behavour.
I am using hobbywings x8 motor, esc combo, it has 100A FOC ESC
All motors are getting 12S, 24000mah power supply… I have tried with 2 16000mah battery in series as well, but it gives similar sag.
have you done a esc calibration?
I had done earlier when i was using on different setup initially . I haven’t done with pixhawk
remove your propellers and do the ESC calibration.
Yeah, I will do it today… thank you for responding… and please keep updating if you find any other issues/solutions, the voltage sag i am getting is unusal…without payload (24KG TOW) i can fly for 15-20 mins easily without any issue but it payload, it behaves differently. I can’t even fly for 2 mins with 15kg payload
i just done some more checking you cant calibrate those escs, they have fixed range of 1100-1940 so you will have to go to your servox parameters out settings and set that manually for all the motor channels. but that shouldnt be enough to cause the imbalance that is seen on the log,
Should i set this value as min and max value of servo1-servo6?
yes but that still would not explain the graph, you have a very large imbalance in your motor, its flying with 3 motors at full power and 3 at near idle, normally thats only seen on frames with twisted motors since its having to throttle up the opposite motors to counteract it. it’s possible with the weight of your machine a couple of degrees on a few motors would be enough to cause this.
some motors were twisted by 1-2 degrees, i have adjusted… i will test it today
It’s a mechanical Yaw bias problem commonly seen as noted. Motor mounts twisted, arm or frame distortion. It’s almost always the cause of this problem.
Round arms and motor mounts w/o positive mounting features?
it looks like it mounts to a carbon tube so I suspect it has probably rotated. how are you levelling your motors? just eyeballing it?