Hello there,
Last Sunday, I had a crash with my quad, a 500mm Quad, 6s, Tmotors, 40A Hobbywing x-motor 40A ESCs, 15 inch props.
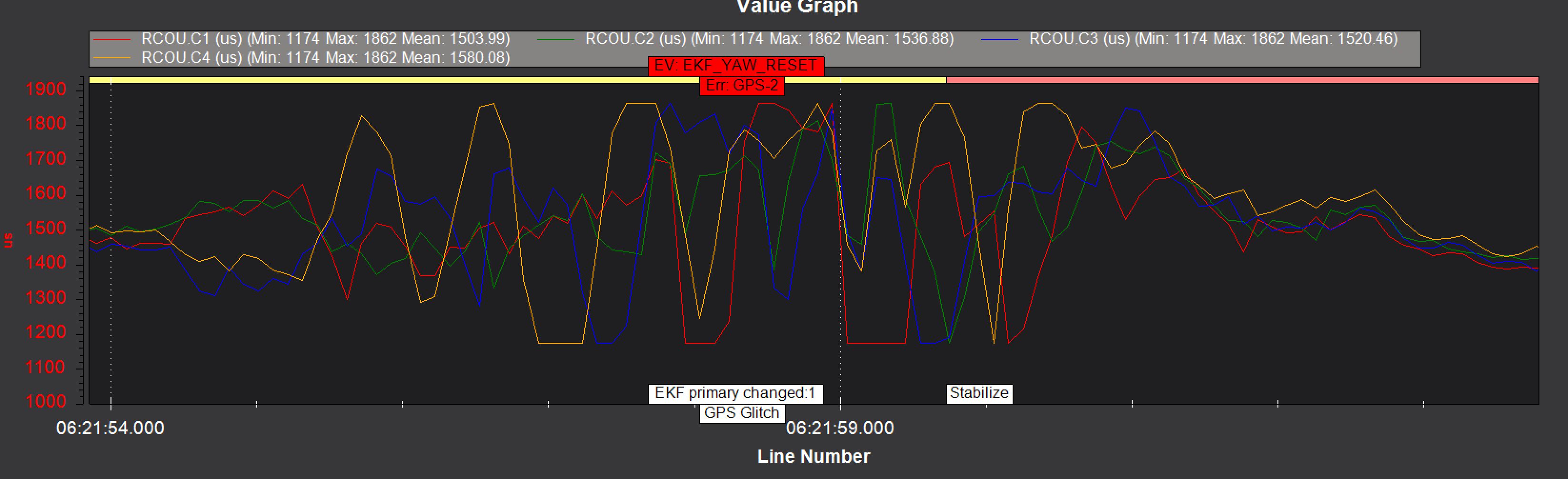
It looked to me as if one of the motors had failed in flight. I had some oscillations in the roll axis in loiter mode. This had happened to me before, so I switched to stabilize, which immediately brought the oscillations to a halt. Tha drone stood in mid air. I was just getting ready to switch back to loiter, when one of the quads arms dropped down with the motors seemingly not spinning any more(at least not as fast as I would expect).
Now I did buy this quad used and assumed it would be quite good, but I am not happy with the solder joints. They look like not enough solder was used and the ends of the cables are not twisted together.
I have quite some experience soldering, but not with connectors this large, so I am uncertain how important those things are.
The motors all spin up with the escs connected directly to the receiver.
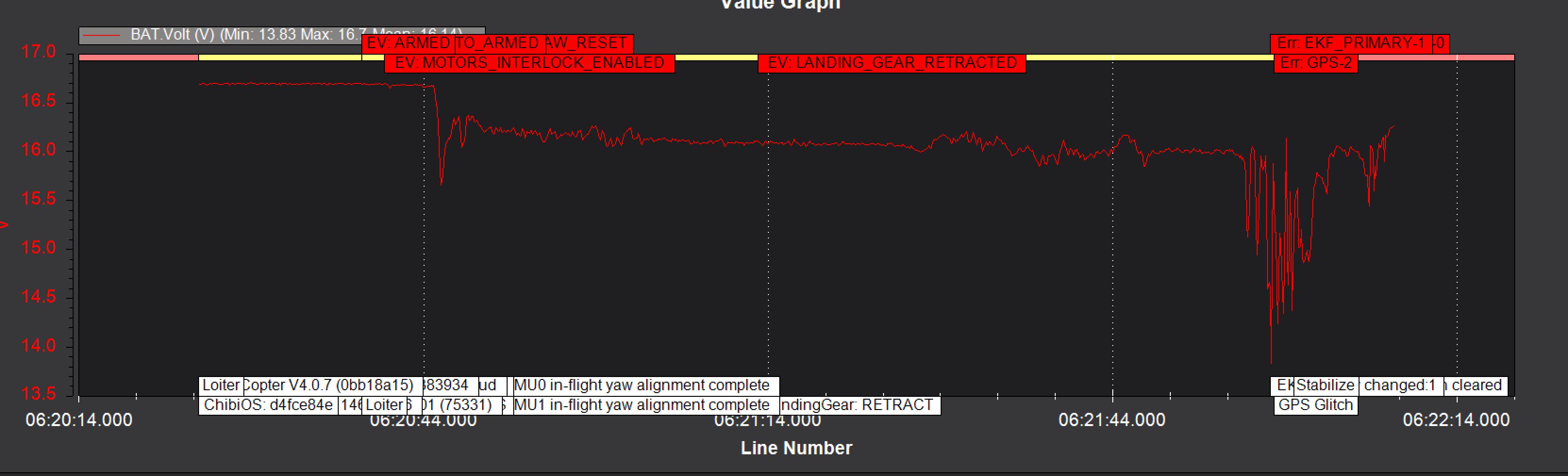
However, It would be great if someone could take a look at the logs, as I have never done that before. The automatic analysis did not produce anything I would consider cause of the crash, but I can see the BaroAltitude dropping rapidly and the battery being stable, so the battery seems not to be the cause.
Thanks for any help!
As the logs are too large to fit in here, I uploaded them to wetransfer: logs.bin
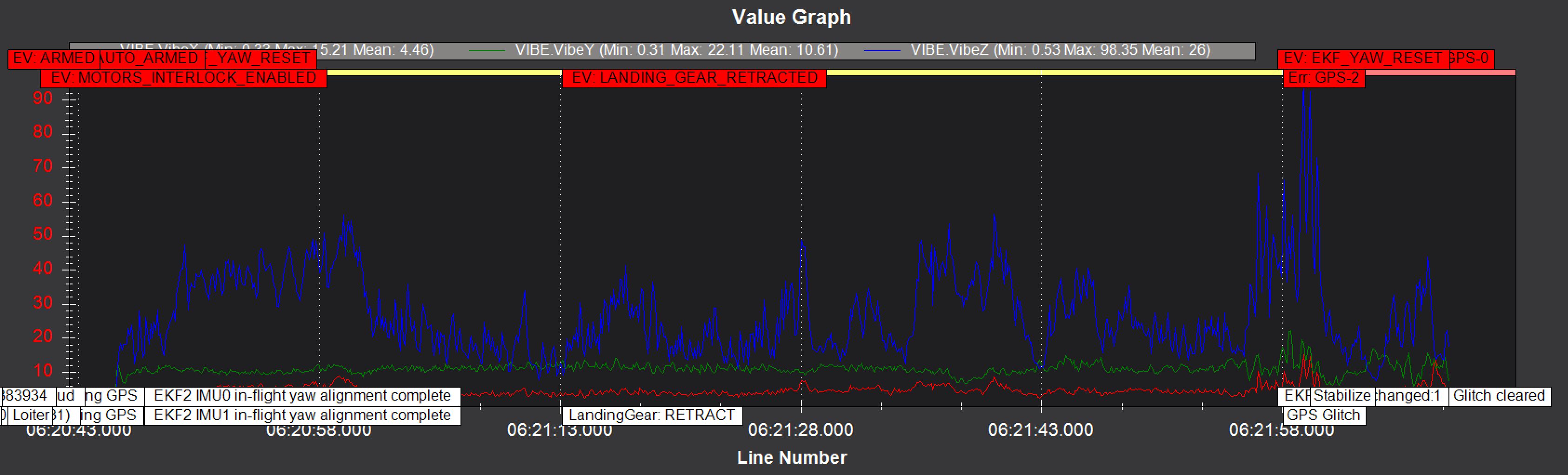
The PID values Pitch to Roll are quite different which is not typical. Looks like from Auto Tune, so I would fix the Vibe issue, set the Roll values equal to Pitch, configure the Dynamic Notch Filter and run another Auto Tune.
Use the Mission Planner Atl>A plug-in to tweak some of the initial tune values. What you have is not the best starting point for a 15" craft on 4S.
Also these are off by a factor 10.
MOT_BAT_VOLT_MAX,168
MOT_BAT_VOLT_MIN,132
Until now I didn’t even know this was a thing. I basically worked along the “first flight” manual in the docs. That’s how far I know ardupilot.
So I am a noob.
Okay, I think I did enter 13.8, which should be the correct value for 6s. In that case Mission Planner did not recognize my decimal separation. Maybe I used a , as I am from Germany.
It’s not the correct value for 6S. Max at 25.2 and Min at 19.8 are the correct values for 6S. When checked with a voltmeter what is the readoing of that battery fully charged?