I have a question about the connectivity that Mission Planner provides in a RTK setup (using Here v1 rover and base, with Pixhawk 2.1; all components running the latest software).
Current situation:
In the “Inject GPS” dialog I can successfully connect to a NTRIP caster (a vrs network realtime solution), with my credentials.
Alternatively, I can instead successfully connect the rover to the base station and receive corrections from there.
I don’t fully understand how Mission planner works those two connection routes. I know that when choosing the COM port connection (to the base station), Mission Planner sends the base station’s correction data to the rover.
Unclear:
What happens though when I chose the NTRIP connection variant?
Does Mission Planner then send the corrections from the NTRIP caster straight to the rover ? (Essentially also bypassing the need for a base station?)
Desired Setup:
As I am planning to set up a moving base station, I am considering the following setup, to achieve good accuracy:
Feed the base station with live correction data coming from the NTRIP caster, AND
Feed the rover with correction data coming from the base station via modem.
Question:
Can this be achieved with Mission Planner? How?
(If possible, I would like to avoid work arounds through u-center.)
Thanks in advance for competent advice (or corrections of a wrong assumption)!
MP will send your current configured home location to the NTRIP server, to establish the VRS base location
yes, its a direct copy of the rtcm data from the ntrip caster to the gps. no modification is done.
moving base means both are on the same vehicle, just a fixed distance apart. this is use to calculate heading. also the here+ does not support being a base, and a rover at the same time.
What would be the “current configured home location” you refer to?
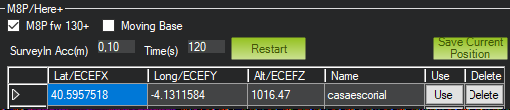
Do you mean the position of the base station (by either manually entering a known location in the table and choosing “Use”, resp. by clicking “Save current position”)?
Maybe it’s easier if I outline what I am after in order to achieve absolute (not relative) positional accuracy:
place Here+ base station on tripod in field
obtain precise location of base station (by connecting MP in the Ingest GPS dialog to an NTRIP caster); use the position obtained by clicking “Save current position”
disconnect from NTRIP service
use this stationary base station location for corrections sent to Here+ rover, to improve location accuracy of rover (by connecting the Ingest GPS dialog to the Here+ base via COMn)
Does that seem sensible or am I maybe missing something?
Or is there a better/ recommended way to achieve the above using MP?
Thanks in advance for your guidance!
P.S.:
Thanks for clearing this misunderstanding up!
(I thought this option would allow me to move around with the base (connected to an NTRIP caster), say on a boat or a car, and still forward corrections to the rover…)
Thanks very much for clarifying.
Am curious to see what an average fix time will be when employing NTRIP. Thus far I had inconsistent results, although at times that may have had to do with a sub-optimal positioning of the base.
currently mission planner doesnt assist in the surveyin. you would currently need to use another program to do the surveyin while providing ntrip data to your base.
this could be an improvement into the future, but depends alot on the hardware you use.