hello. I have several tuning session on 5’’ quad
autotune roll axis
after this tune session everything OK. Quad fly well.
i change battery, change tune axis to pitch and try autotune in poshold
After autotune success i land it. Try to takeoff in stab and i can’t control it. It became totally uncontrollably on pitch axis. I found autotune set Stab P extremely small. Probably because i autotune it in poshold mode. So i restore pitch pids and try autotune again.
Now i change tune axis to pitch + yaw and autotune in althold mode. And again after autotune it became uncontrollably. So i emergency land it via motor stop feature. But when i see PIDS after autotune and they was normal. I manually lowered it a bit and try another attempt.
After this autotune session everything ok. I try control it in stab mode, and it fly good. I don’t understand why previous attempt was bad.
Also i see Autotune reached limit on pitch and roll axis. How can i fix it?
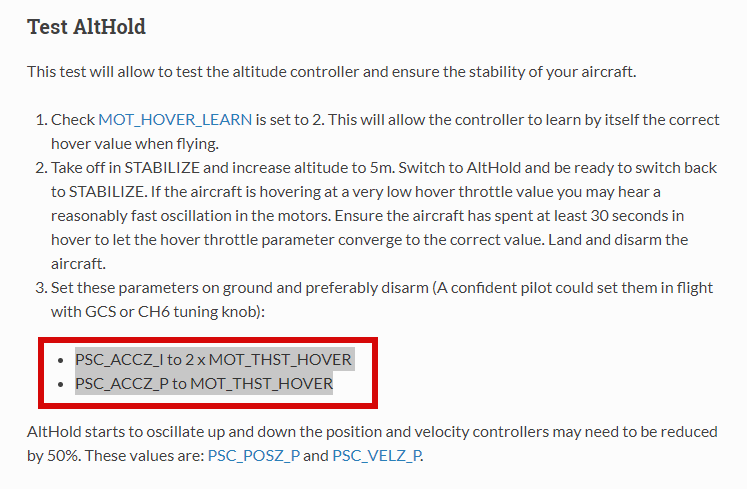
oh okay, PSC_ACCZ_x we change. hmm, looks like you have used a set of motors that are overpowered. You can consider trying MOT_HOVER_LEARN to see it gives you 0.11.
Double check on the MOT_THST_EXPO value too, should be 0.55. more accurate you can use the motor spreadsheet to calibrate if you have the motor data.
below are the initial parameters calculator will change from the default base on propeller size.
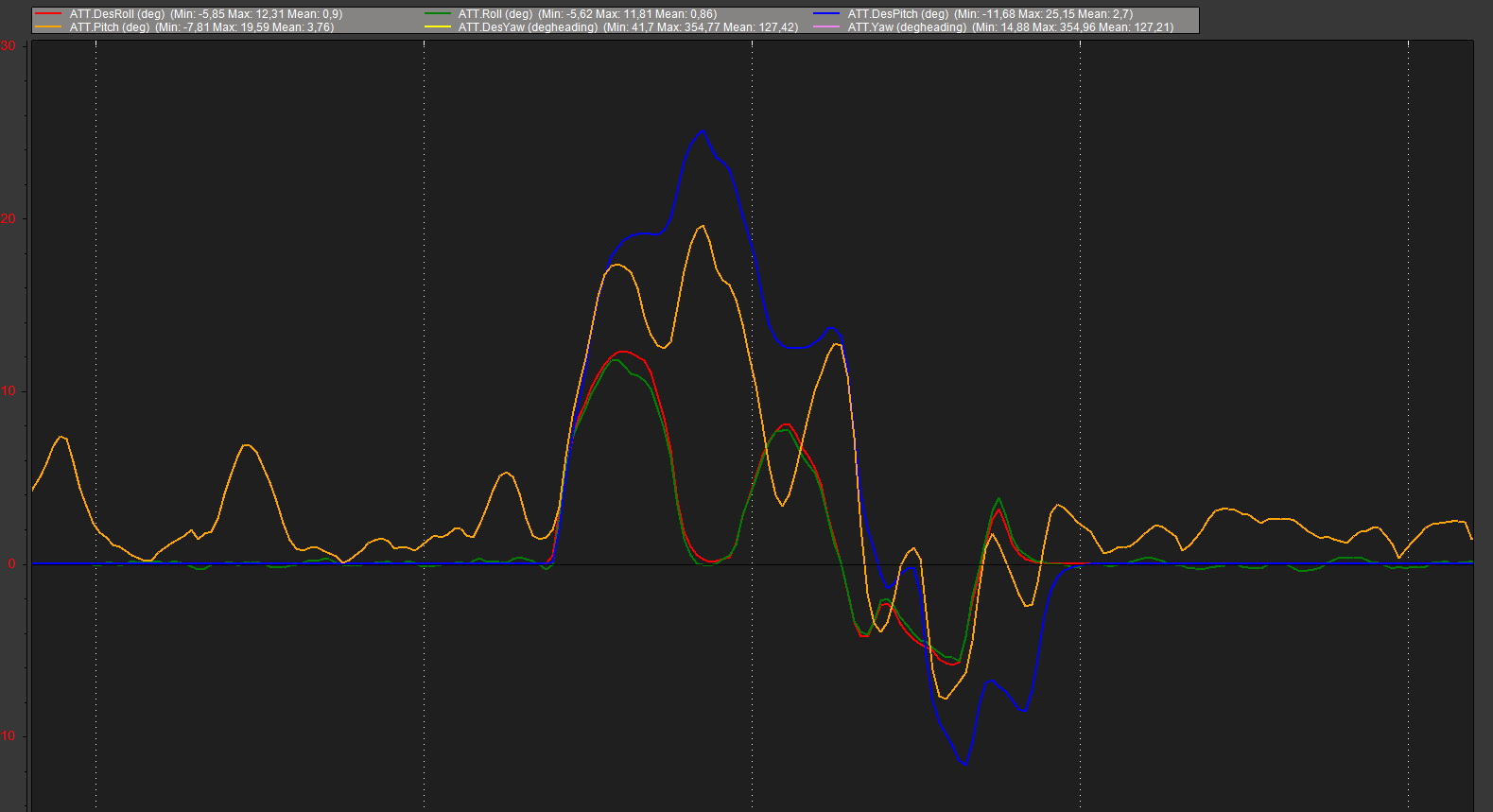
You had high vibrations on the Y (pitch) axis. That may be a cause of your problem. Note the wrong calculation of the mean value in the legend. I wonder why this happens.