Beagleboard.org has released an upgraded version of the popular PocketBeagle, designed as an ultra-compact, low-cost, and powerful single-board computer (SBC).
PocketBeagle 2 is based on Texas Instruments AM6252 - dual core and a new version was announced with a quadcore AM6254.
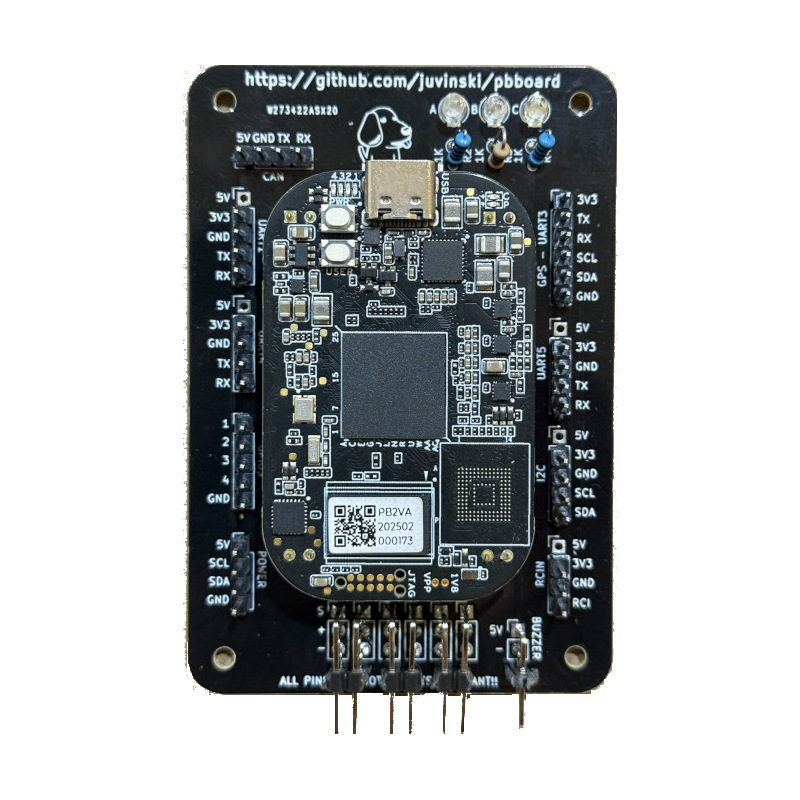
I create a DIY cape, using a GY-912 - ICM20498 IMU and a BMP388 baro in the same breadboard to save space.
To measure battery I choose to use a Holybro PM2D - to save space and the precision, but other i2c sensors can be used too.
There is headers for CAN, GPIO, GPS, OTG.
It’s BeagleBoard.org, not BeagleBone.org, but I get it. Also, only the earliest PocketBeagle 2 had the dual-core processor. If you get any today, they’ll be quad-core.
Great work there !
We support beaglebone for years ! So that is nice it continues and the hardware is great . I am eager to see what can people can do with this (other than just loading BlueOS )
Thanks @khancyr ,
I’m finishing my tests with DShot - I’m testing to see if can be the PRU deal with the telemetry - and eager to test the new version with a quad-core AM6254 processor
Can this Setup run as a Companion Computer (Companion Computers — Dev documentation) to do things like vision processing or is the cpu only running ardupilot.
Hi @Tristan_Redish
I never thought about a companion computer but is a quadcore cpu and pretty tiny - with no vision/ai accelerator running Ubuntu or debian
This is a Linux question not ardupilot, but yes, you should shutdown the Linux - pressing the power button and wait some seconds to the shutdown process completion.