This thread is to cover a drone frame I’ve recently designed/made/flown. The first flight was today. This might be of some use for others, as I used a (maybe) interesting config that wasn’t as straight forward as my previous builds.
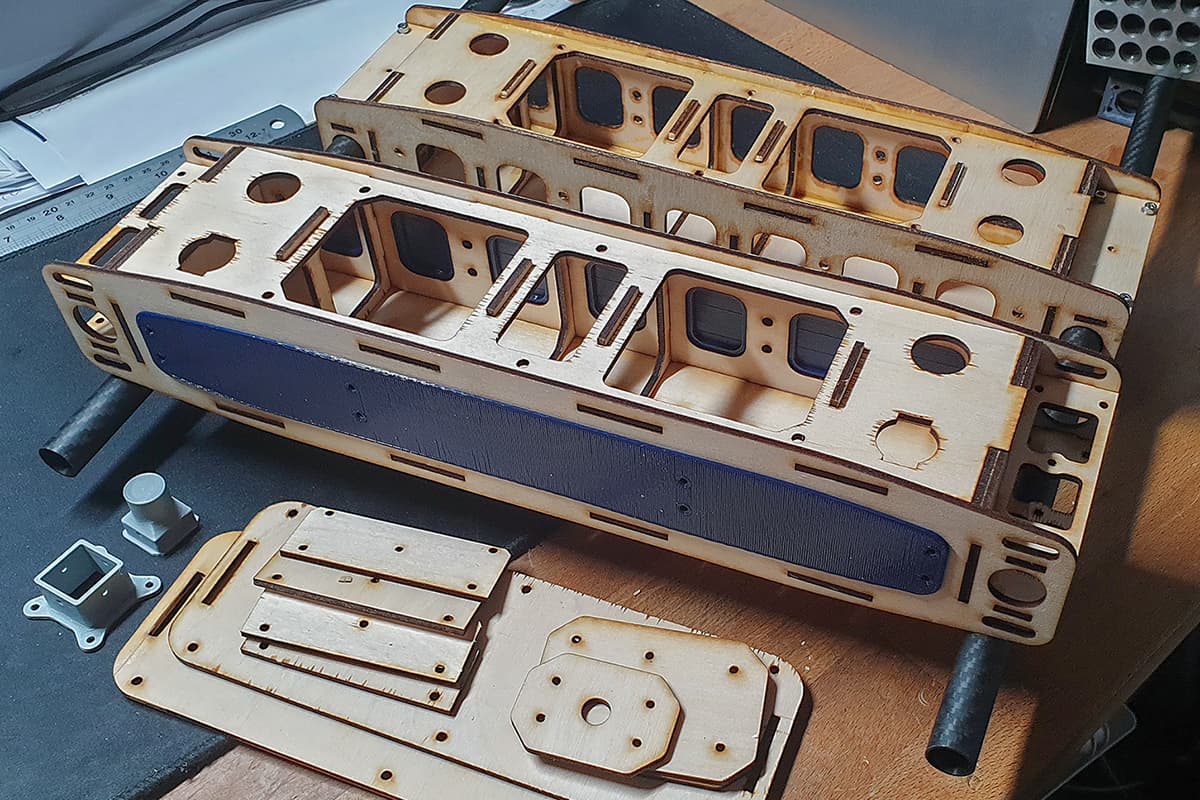
This is the frame - it is a plywood fuselage with carbon tubes for motor beams. The beams are secured to the fuselage with clamps. The fuselage has some internal structure - essentially two bays. Front bay is for the black cube, and the rear bay is for the power - the Hobbywing 60A 4-in-1, and mauch current sensor and BEC. ESC lines run to the 4-in-1 esc down the outside of the arms (for now) and along the inside of the fuselage - not ideal as there are 6 wires passing the cube in fairly close proximity. I use a tiny SBUS futaba receiver (P-R2000SBM) for RC control and an RFD radio for telemetry.
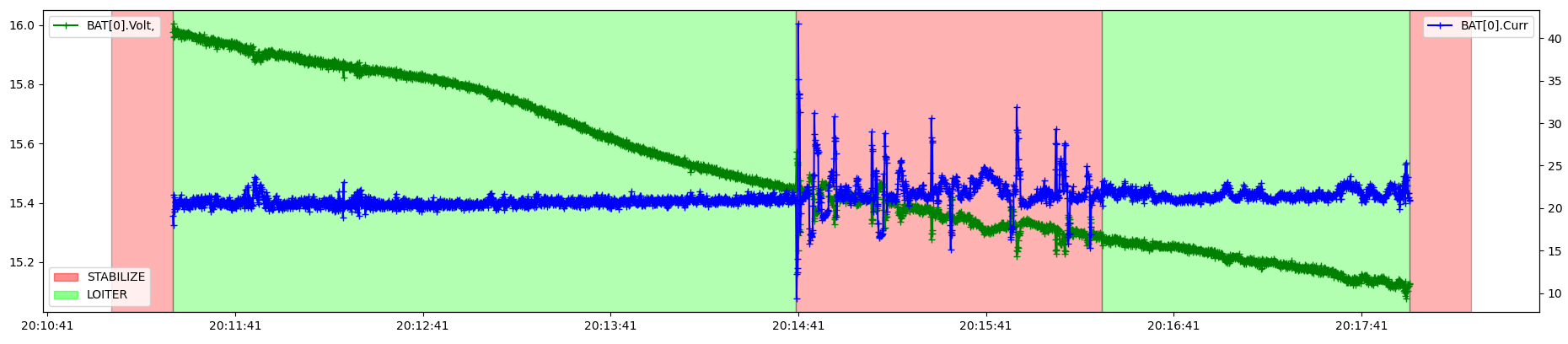
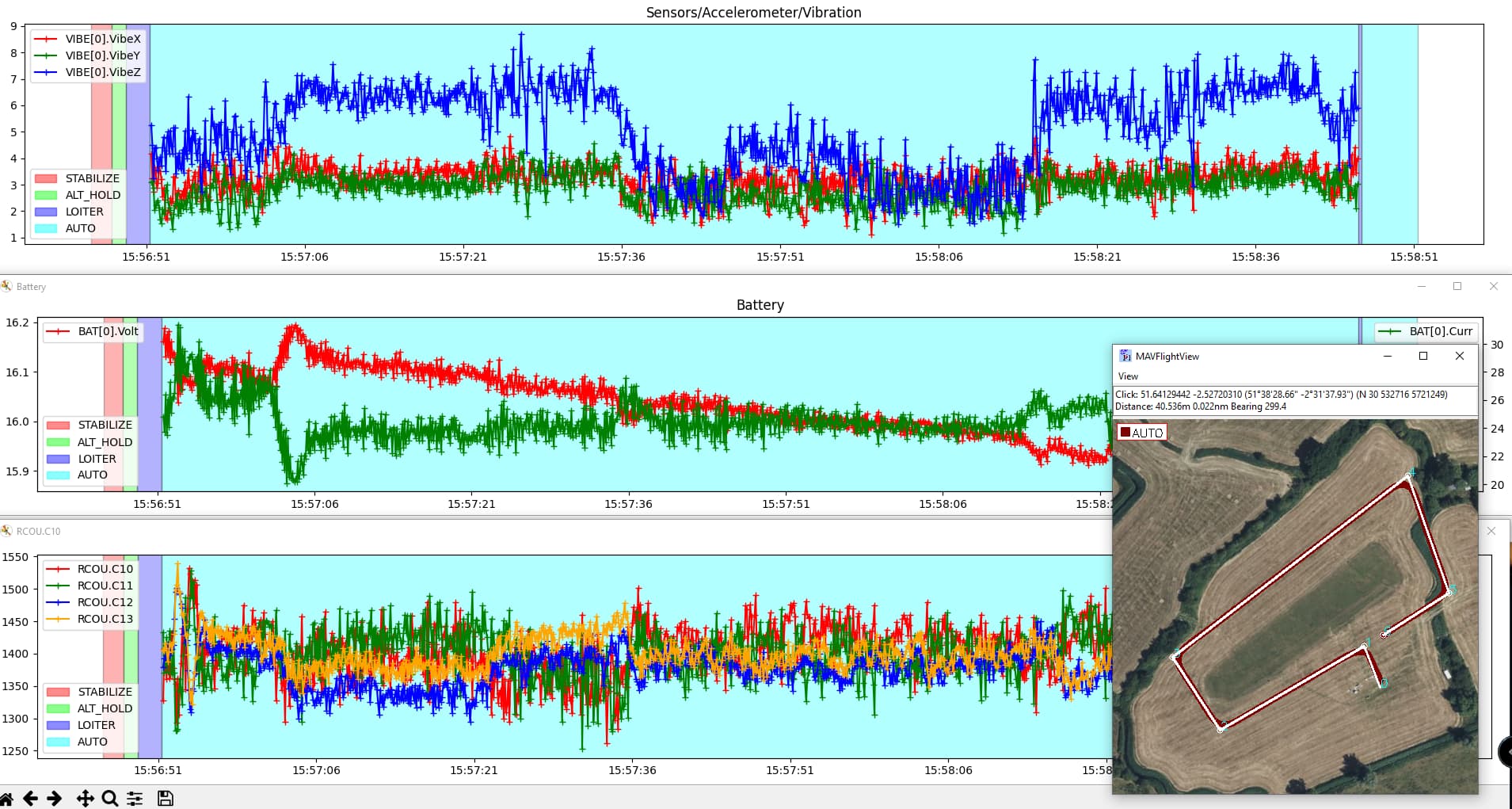
I’ll get on to figuring out the ESC and cube link up in another post but, here are some traces from the log file. Vibes look good to me, and current draw was as expected - very close to ecalc, actually.
Shoutout to Xfacta for his help in sending me up the learning curve with setup and tune.
Here’s the full log for the data - it includes some messing around at the beginning as I figured out the right motor numbering between 1234 and ABCD - more on that later.
I had a good few flights from the airframe in the first picture. I then had an incident with the drone, which it turns out, was probably mostly related to the fact that I was relying only on the clamping force of the tube clamps to stop rotation. When the airframe probably clipped a tree branch (which it had not done the day before, in the same place!) the front tube rotated and the airframe became basically uncontrollable whilst still being able to fly. I found this very disconcerting as it felt like the aircraft was doing its own thing or had been intercepted. Thanks to Tridge, I was able to understand the incident and move on…
So, now I have finally completed and flown the next iteration of the design - approximately the same but with some useability improvements. It flies using the autotune params from the previous airframe. Now to improve on that tune and introduce filtering. This airframe will become a betaflight airframe and I will be able to use the Cube in the next design - which is another plywood airframe twice as big.
Graphs below are from a single pass around the flight plan in auto. Weather was cool (11ish Celsius), fairly calm with maybe gusts to 12mph. Other flights show similarly good vibe traces (worst vibeZ was a little under 11). Flying weight was approx 2.2kg (TK14_C2).