I’m really new to drones and I couldn’t deal with this problem.
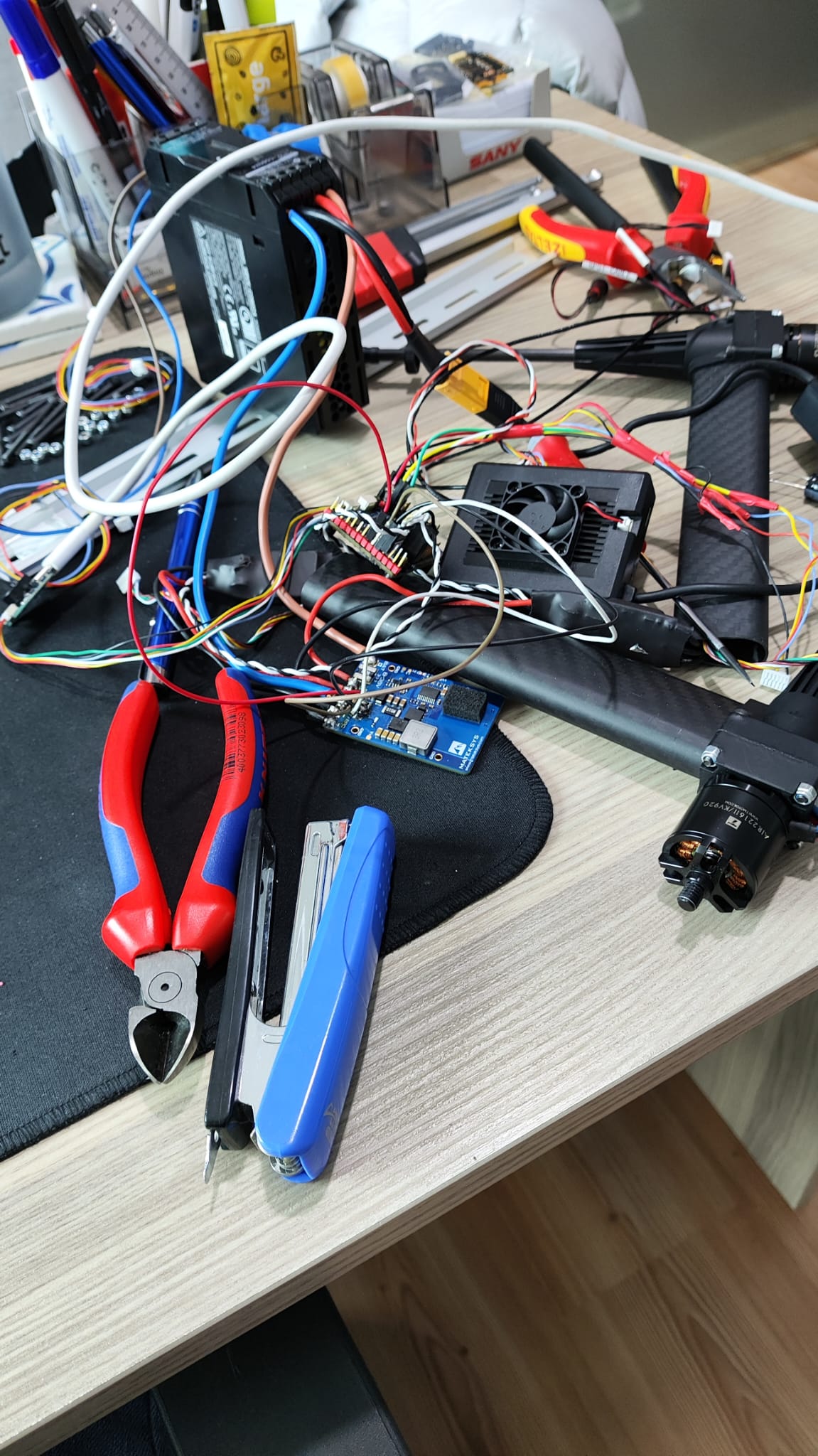
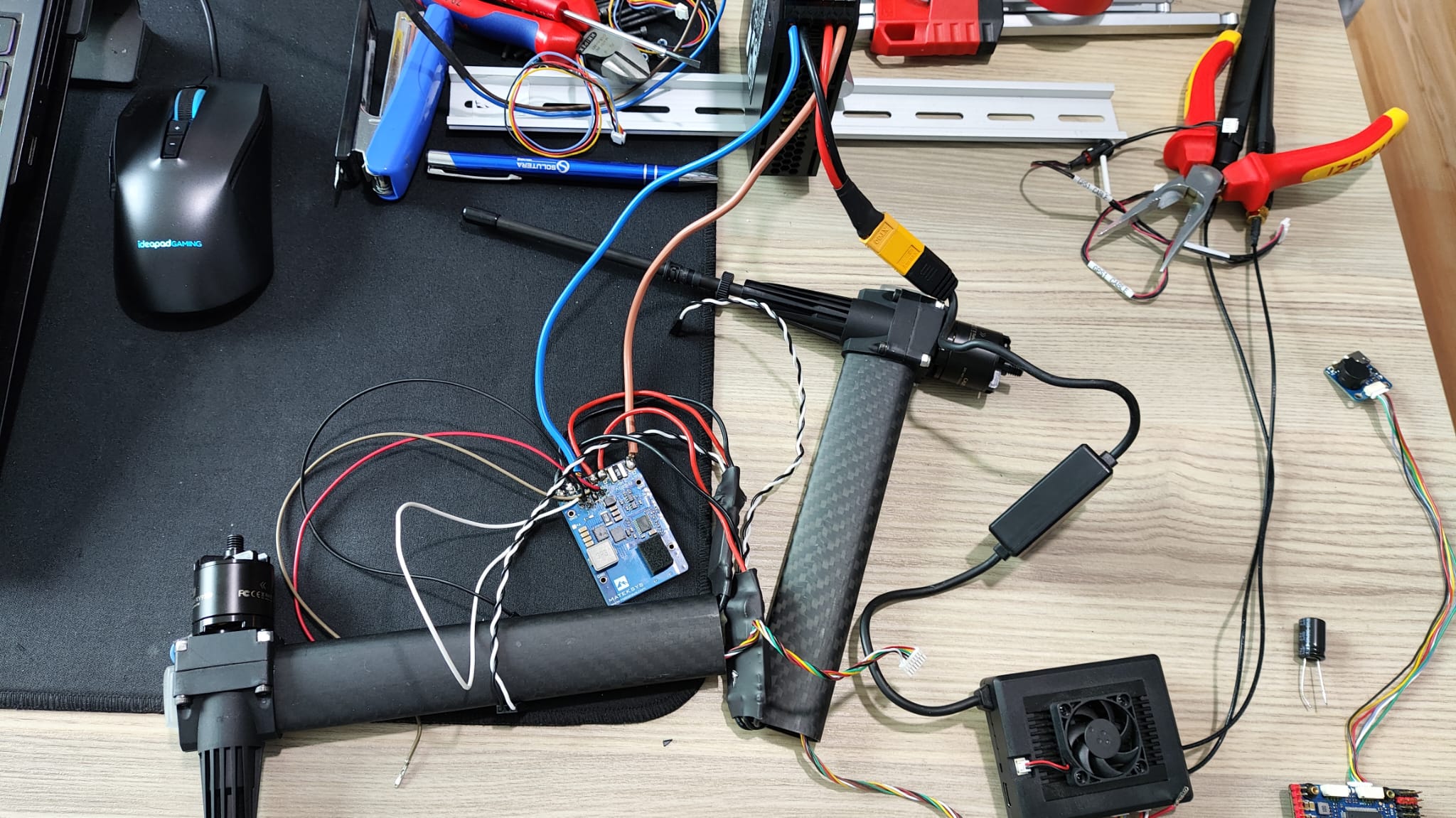
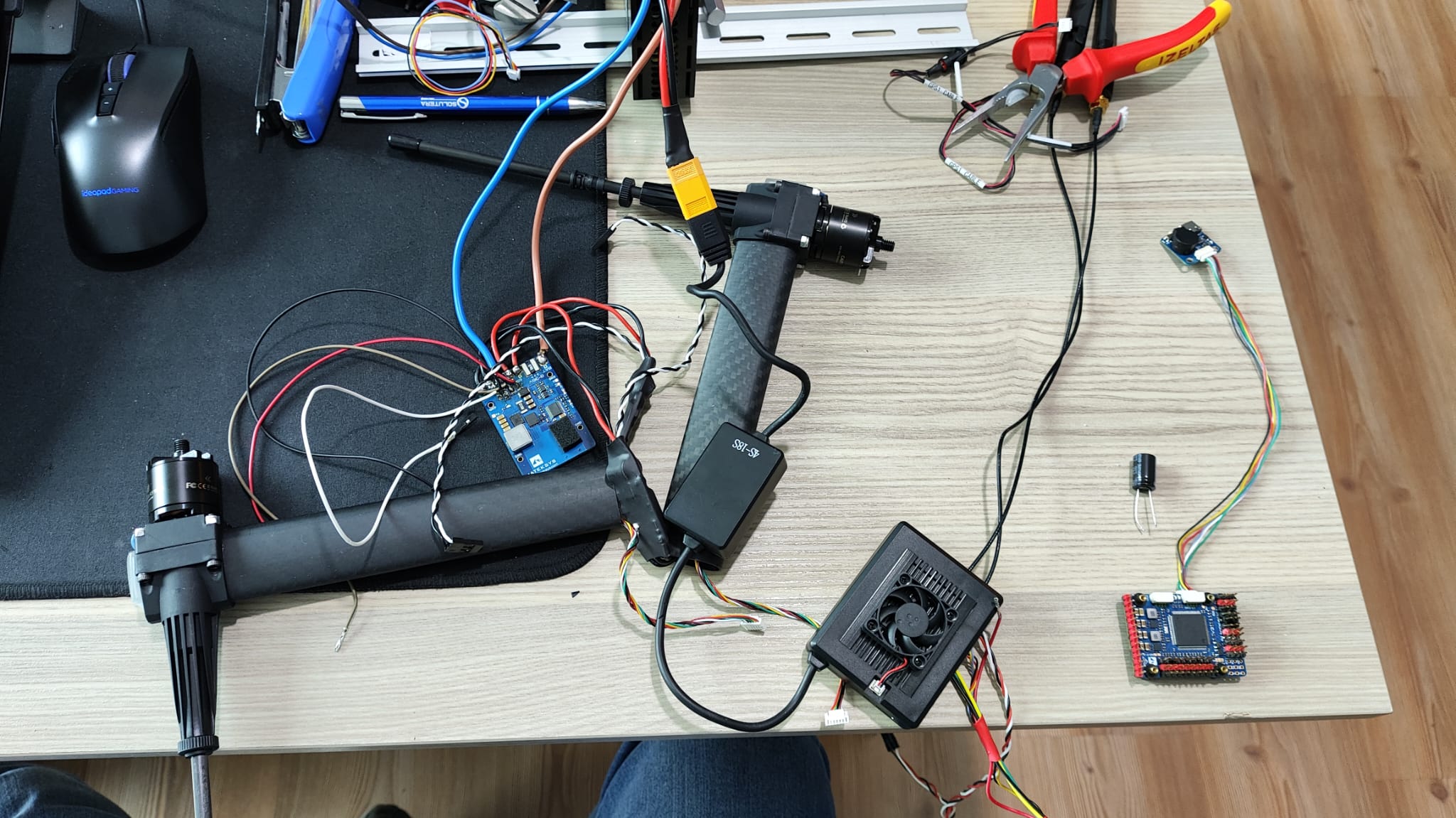
Can someone tell me how to wire it like I would explain it to a really stupid person? You can see the photos and cables in the image.
I have a MATEK H743 V3 flight control card, 1 SIYI MK15 ground control station and telemetry, 2 T-MOTOR AIR2216II ESCs.
Note: Before the Matek board, I built an edu-450 using cubepilot and got everything working properly. You can also see the photo of the drone. I need to test the same ESCs and SIYI MK15 with the Matek card, that’s all.
Thank you so much,
I examined similar schemes on Matek’s website, made various connections, but I could not establish communication. That’s why I opened a topic here and asked for help. I will try again, I hope I can succeed.
I did the soldering and wiring by looking at the schematics. But I think I’m doing something wrong, because if I try to test the engine via betaflight, I can’t because it doesn’t work, or if I want to test my remote control, I can’t because it doesn’t communicate.
Actually, that’s exactly why I’m looking for a friend who will tell me that you should make all the connections here one by one I think I need to make some adjustments via betaflight after making the wiring, and I need help with this as well.
So you can start by reading this First Time Setup — Copter documentation and understanding it page by page and step by step and do the steps that time itself.
Hello everyone, i solved my problem i just need to correct wiring and correct software. everything is working well and i can control matek by Ardupilot. Thank you everyone !
No, you need to stop and start over. The SiYi controller is built to run a version of QGrounccontrol that is optimized to run on Android. You cannot use Beta flight or Arducopter/Mission planner. I have an Android SiYi Mk 32 Handheald Ground Control Station (which identifies as a smart phone) running the Androind version of the SiYi Q Groundcontrol app. I might be wrong but I seriously doubt that you can use Px4 firmware on that flight acontroller. IMO, your best option is to get a Pixhawk or a Cube and flash it with Px4 and then read the instructions for the Mk32 and the air unit.
I completely agree with what you said. But as I said at the beginning, I am still very new to these matters and I am learning both the Ardupilot and the Qround application together. Using Cubepilot and Matekh743, I managed to assemble an edu450, learned various parameters and critical topics. I hope I can find the small errors in my drone and have the chance to fly it. I will open a new topic on this subject, and I am waiting for your valuable comments. Thanks.