Hello,
I removed the mechanics from my VARIO Bell 230 and built it up as a trainer mechanics.
The trainer now has a rotor diameter of 1.8 meters and weighs 7.5 kilograms. The rotor speed is 1260 revolutions. I have lengthened the tail tube a bit, so that I can later install the mechanics in a 2 meter fuselage.
I used the SOKO-Heli-Tuning-Tool to adjust the swashplate and the center of gravity correctly.
For the adjustments of the tail, I followed the recommendations of @ChrisOlson Chris Olson. In his thread he describes his adjustment method for large model helicopters.
I have therefore also set the COL_YAW to zero.
Only the values for ATC_RAT_YAW_P = 0.22 and
ATC_RAT_YAW_I = 0.13 I have adjusted.
With these settings, the helicopter already flies quite well as far as the tail is concerned. The rest is not yet optimal. But I want to adjust the tail well first. This is what the tuning documentation for traditional helicopters calls for.
When I fly the helicopter with these values and observe the tail, I observe the following.
- when collective is actuated, the tail is deflected a little. Therefore, the tail is not stopped immediately. You can see how it is stopped, but on this occasion it oscillates slightly.
- if I deliberately deflect the tail to one side with the stick, it follows the command and overshoots, but then swings back a bit.
As I said in my last post, I am still a beginner and have a hard time interpreting the logs.
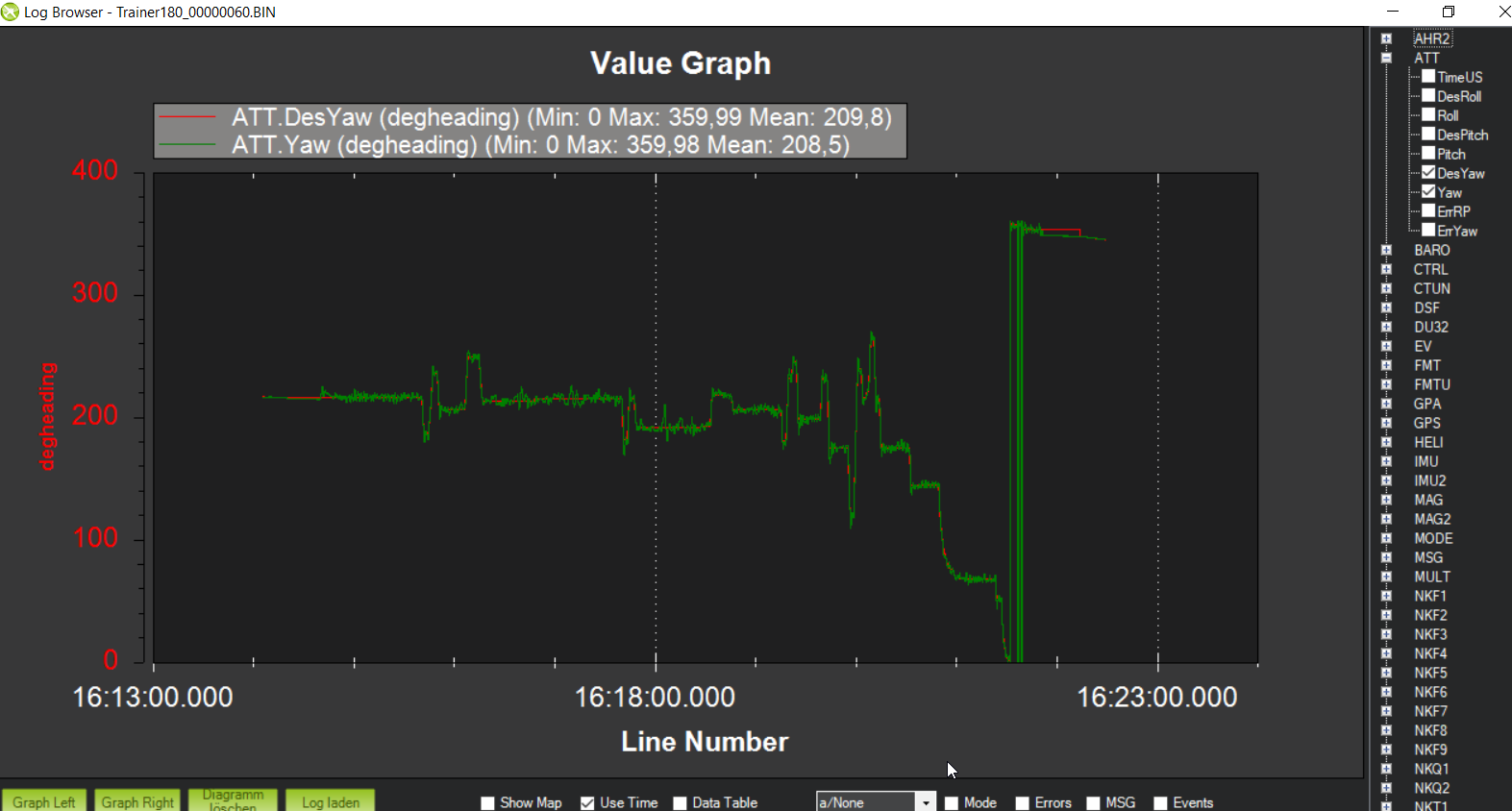
I am looking at the values for ATT.desYAW and ATT.YAW.
Here I see that the value for ATT.YAW follows the ATT.desYAW value but oscillates back and forth.
n addition, I am looking at the values for RATE.desY and RATE.Y. I can see that this is not optimal, but I don’t know which value to change to make it better.


So, can you give me some advices. Thank you.
https://1drv.ms/u/s!AjSq727ChpJzfiDGBQL0cmMytLA?e=h4w8Zm
Here is the BIN.file and the parameter.file from the flight.
BR
Heri