I did follow the guide on ardupilot and some clip from youtube. the calibration steps has been done below:
Frame type
Accel
Compass
Radio
Compass/Motor
ESC manual Calibration
I can Arm and it work
Howerver when i set to max Throttle. my drone do not take off
The default logs don’t have much information in them.
If you could set the LOG_BITMASK to something like 45054 it would include nearly everything.
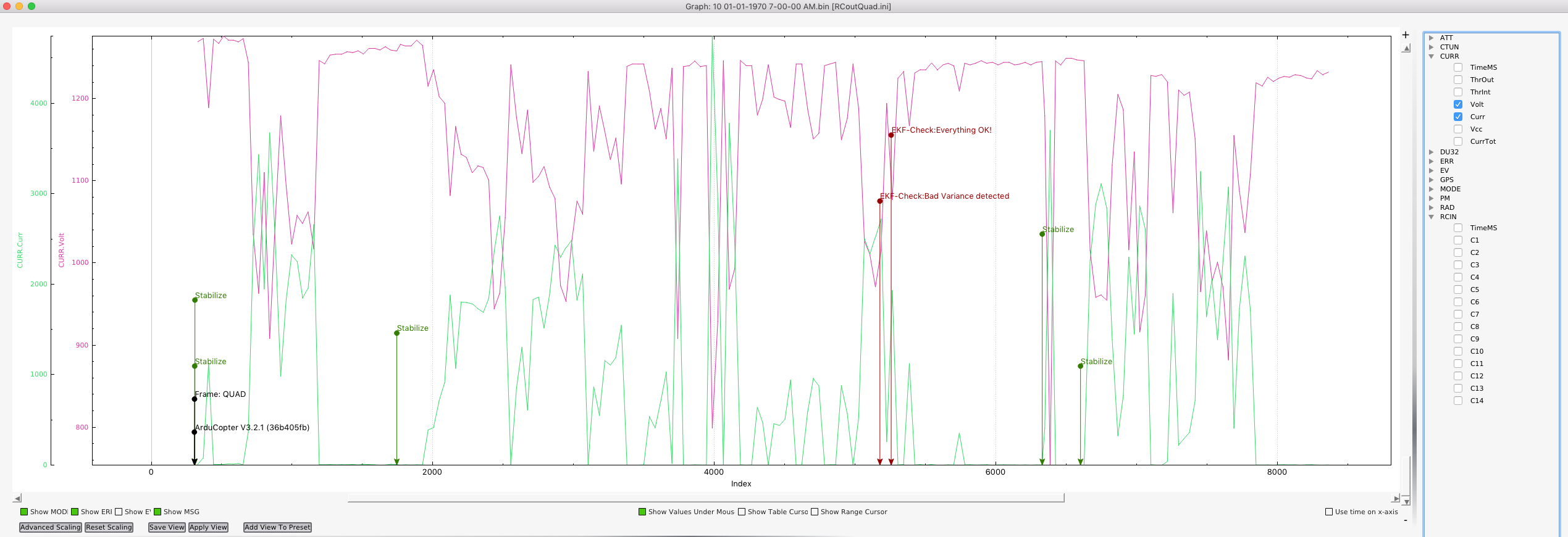
But just glancing at what information is there I see you are using a 3S battery, is that correct?
If so then your battery is not up to the job.
As the current rises to a max of 37A your battery voltage drops to 7.5V.
That isn’t going to get it off the ground.
You should have seen this if you setup your battery failsafes correctly.
Don’t ignore the failsafes, they will help.