I am working on ArduPlane with SV controllers. Had a few flights, too early to say success but it is flying. I wanted lighter than 200g ArduPlane to fly over 150m, out of LOS legally here and SV is a winner on weight and cost.
Flew it a few times to servo_auto_trim, was able to switch mode to stabilize, FBWA, FBWB. RC Link is a pain, not sure it is working stably or not. It lost control or orientation a few times when I switch flight mode. Already crashed 3 times, no serious damage because it is so light.
Built plane firmware from current master and loaded on SV boards got at eBay. Amazing plane is built without any issue.
The wing is 600mm EPP Wing kit. Flying weight is 171g with 3s 350mAh battery. It can fly slow and ok.
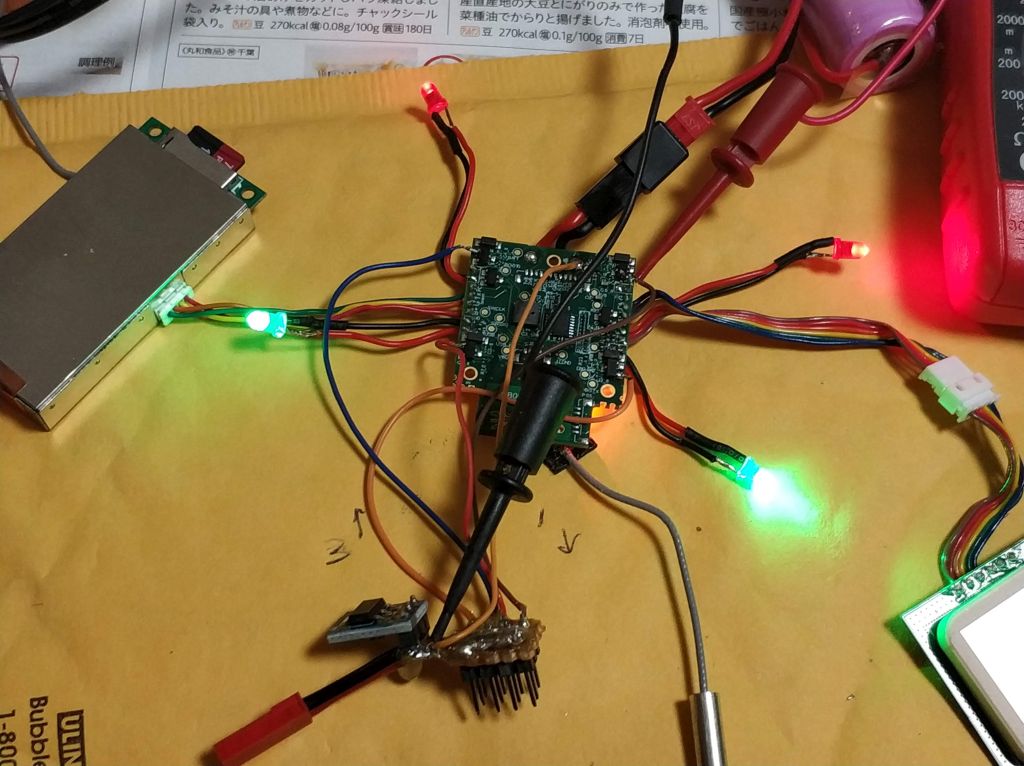
For wiring, gate(?) pin of FETs outputs 2.8V, can control 5g servo I had. Soldered out 4 wires and ground on SV board. Matt’s post in RCG helped a lot. Servo power is supplied from motor ESC BEC.
SV board is powered directly from 3s battery through regulator set to 3.3V or so. (This photo is not final config.)
Issues,
1, Radio
I am using OrangeTX DSM2 module on Taranis. It took so many trials to bind, also it seems to fail to re-connect when powered up again? Not sure it is simply taking too long time. Also I need to check if it can connect again reliably when it comes back from out of range distance.
Looks like SkyViper2450 plane does not have setup for TMODE? so I gave up SV TX and chose to use OrangeTX for now.
Need to investigate on flight mode change issue. Checking logs but not sure yet.
Questions to solve
How can I control camera with external TX switch?
Need to think about a way to set up voltage monitor because SV board supply is now regulated. I am considering to build some divider later.
hey! you gave me a great idea. I never thought about looking up SV 2450 parts on ebay. hoping to get a steal! I want to attempt a “transplant” as my very first build ever…but didn’t want to take apart my SV. thanks!
I suppose you could attempt to pull the Tmode.h and .cpp over into your own personal plane fork and change its contents for Plane flight modes rather than copter
Also change
public:
friend class Copter;
BATT_VOLT_MULT is a parameter to set ratio of voltage divider. Commercial voltage monitor is too bulky, probably I will solder 2 registers to create one to divide to less than (probably) 2.8V, and set BATT_VOLT_PIN to change port, set BATT_VOLT_MULT to match divider.
Sky Viper is difficult to buy outside US, Canada and Australia, authorized resellers will not ship overseas, box is bulky shipping cost is high. There are a few good sellers at eBay who resells store returns and such.
Quick update. I had more flights this weekend, only 1 crash as I got used to its behavior. Looks like this requires more work to fly well.
RC radio connection is better. I just need to wait longer to get it connected, no need to bind every time.
Relocated GPS to the side to get better connection.
Having tough time with ‘Bad AHRS’. On most flights, I get ‘Bad AHRS’ message, when flew (with disabling dependency check), control are frozen in FBWA, FBWB, RTL mode.
On the ground servos are working to correct direction in those modes, but there is no movement in the flight when I switch to them.
GPS is good, vibration is not much. Tried to disable compass but no go. Checking (or learning to check) data logs further.
Also started to check ChibiOS thread and gitter as this is new on-going development.
Looks like this takes longer to finish but having fun.
Noticed it is not using gyro?? Regardless the build,
GyrX in log stays NaN. Gyro value in SV statistics IMU stays 0.
With SV Copter firmware, these values are output and logged.
Compared PixHawk with plane 3.9 beta 2. It IS outputting these values. I am lost here.
Baro seems to be off. Probably due to high temperature? SV FC board is placed behind Sonix board, which is very hot. Log shows baro alt too high after take off, it gets closer to GPS alt as temperature drops. Need to relocate something.
I was surprised at the amount of heat generated by SV , when just powered on ie battery conected, but not armed . Perhaps the metal box shield is creating an oven out of the sonic ?
That metal box is electric magnetic shield. Removing it may degrade RC/WIFI reception, or may interfere with camera pictures with noise, I guess. I will not touch.
WIFI chip and/or camera chip seems to be power hungry, generating lots of heat.
SV Plane is finally flying waypoints stably. Baro issue is solved by covering it with sponge on the board and in the fuselage. Still have not succeeded with EKF, need to set AHRS_EKF_TYPE 0 now.
Took trials to find good power combinations after burned a few motors and ESCs… Currently 2400kv 1826 size motor with 4x4 prop. Ditched the plane on the nearby creek, replaced electrics.
Here are a few videos taken by Sky Viper plane. I get used to it and can fly stably now.
I ended up to start video recording through Web Interface. (which works ok except flight parameter)
Started to play with Auto landing. Need further tuning but it is easy to use, can use. GPS accuracy is not good enough for my small runway, but can use Tx to adjust approach.
I use DSM2 Tx (Orange Tx in Taranis), it should be transmitting at US power (100mW?) but range is not great, worse once it fails to re-connect when I flew it very high. It was in AUTO mode in loop, repeated the leg until it ran out of battery and falls from sky. Good I was able to locate plane with no damage.
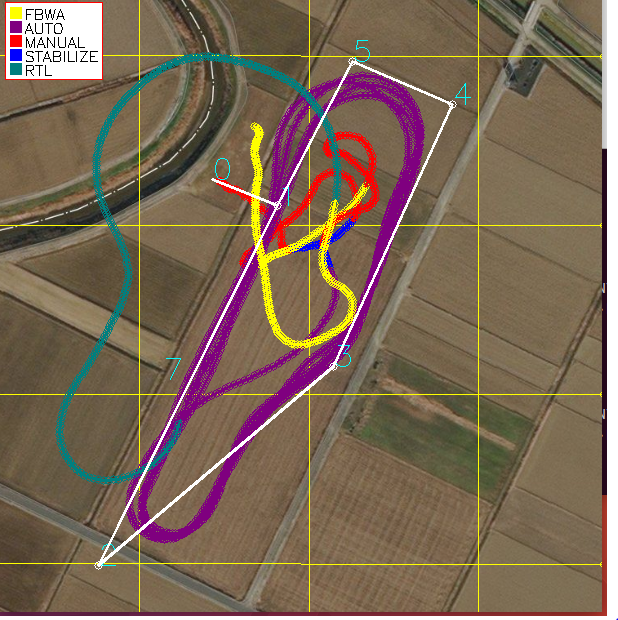
This is AUTO mission to climb to 300m (ended up to 270m) and land. Sunny clear and very hot day.
This is awesome! Quite literally.
What kind of flight time do you get? Ans this thread is bit old now, have you worked on that more? Any updates or issues?
And if will you sell me one of those? only half joking…
Thank you. Flight time is not much, 6-7 min but can travel 3-4km easily. (1.5 - 2km round trip). I limit flying weight less than 200g (law here controls model weighs over 200g), but plan can carry larger battery than current 550mAh 3s.
This EPP wing is very robust but far from efficient. I plan to build another but no time yet. You should try, all steps are documented.
Great thanks, I’m hoping to have time to look into it, I would want to use the wing to provide imaging while the SV swarm go back and forth between targets. I also got distracted looking at VTOL options, because ideally I want the system to be fully autonomous.


 Looks like this requires more work to fly well.
Looks like this requires more work to fly well.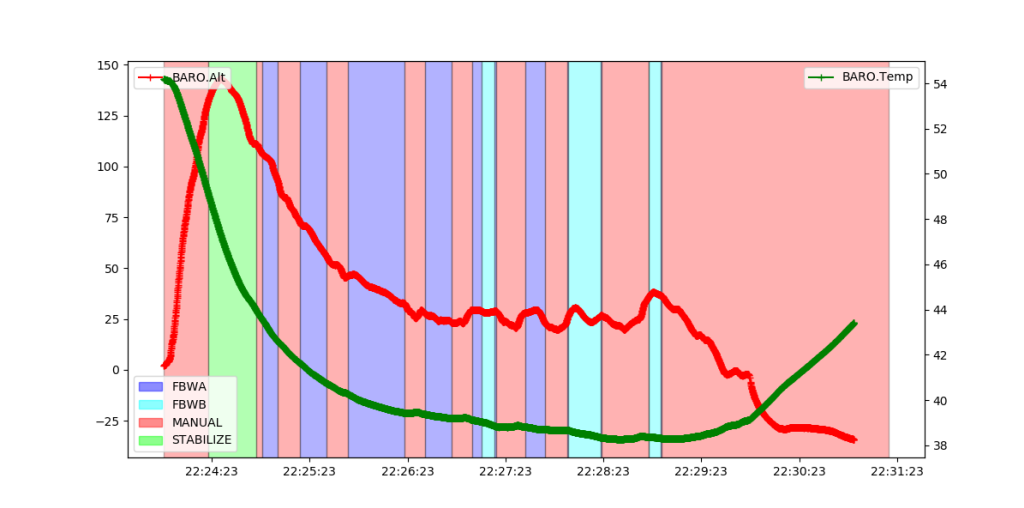


 only half joking…
only half joking…