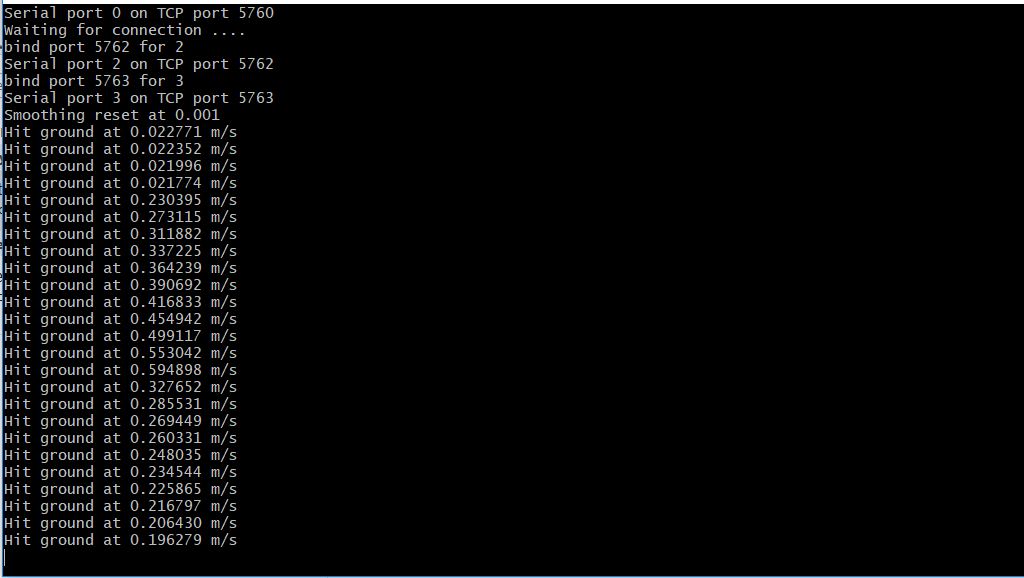
I’m running a SITL build from the “plane3.9” branch (not master) and the vehicle starts with a forward velocity after initiation. So, it isn’t armed, but has a forward velocity. I’ve run it through both sim_vehicle.py and straight from the executable from the waf build and each has the same behavior. Images below:
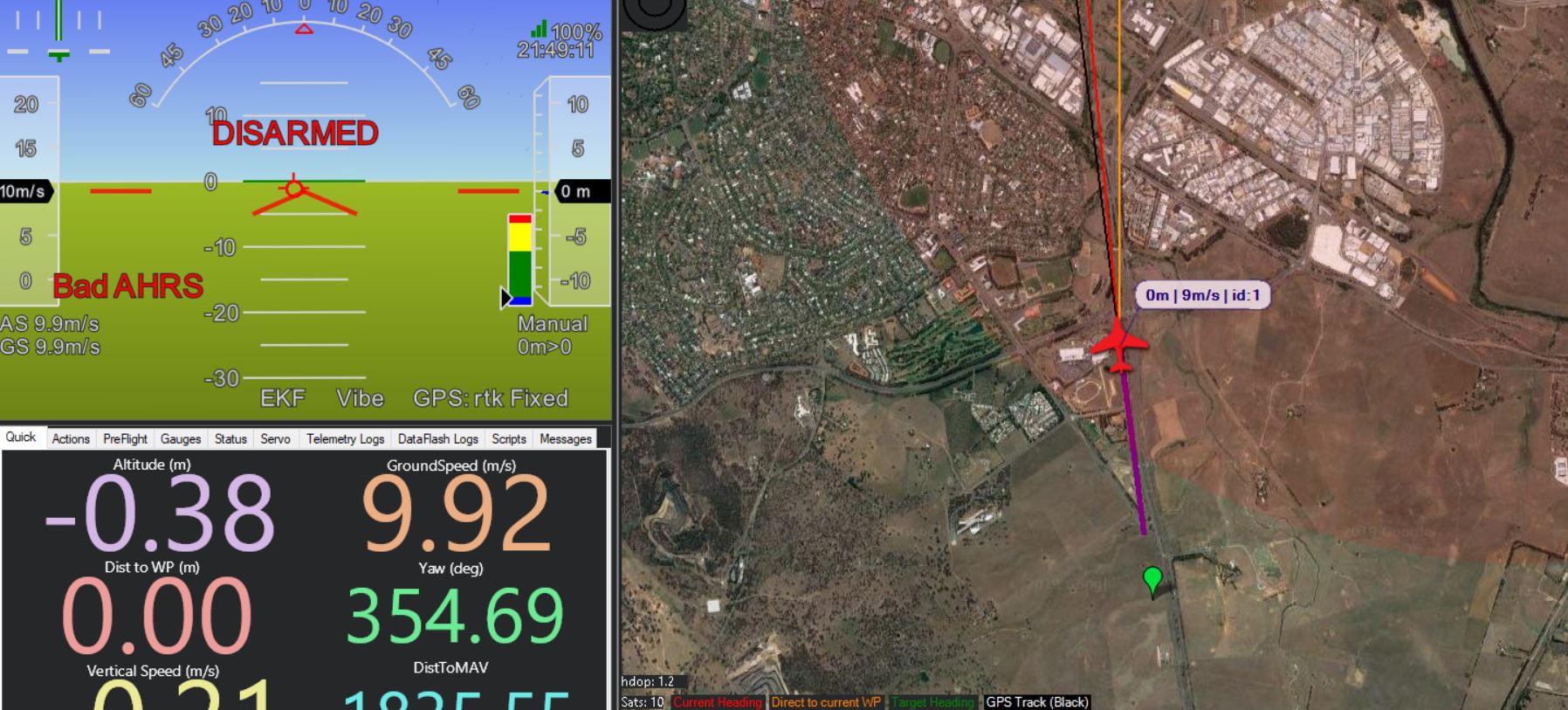
I have recently seen this behaviour (many years later). For me, the problem lies in the reverse thrust settings. I am simulating with reverse thrust, and have configured the aircraft to use reverse thrust on landing and to have a minimum throttle less than 0.
The simulated autopilot adjusts all the throttle values accordingly, making 1500us the “0%” throttle command. However, the motor and esc plant model are not updated, and hence it seems to me that the 1500us from the flight controller is effectively read as “50%” throttle on the ESC.
Therefore, and confirmed with simulated RPM sensor readings, the propeller is spinning immediately even when not armed. This is very inconvenient for me trying to do some reverse thrust behaviour simulations.
In the past there was a build option to include rev-thrust in plane, but looking at the current build options, this is no longer available. I wonder if someone combined it to make it more streamlined, but the ESC plant model has been overlooked.
Would be great to get some input on this.
This was executed with the plane4.5 through mission planner simulation environment.