Hi everyone,
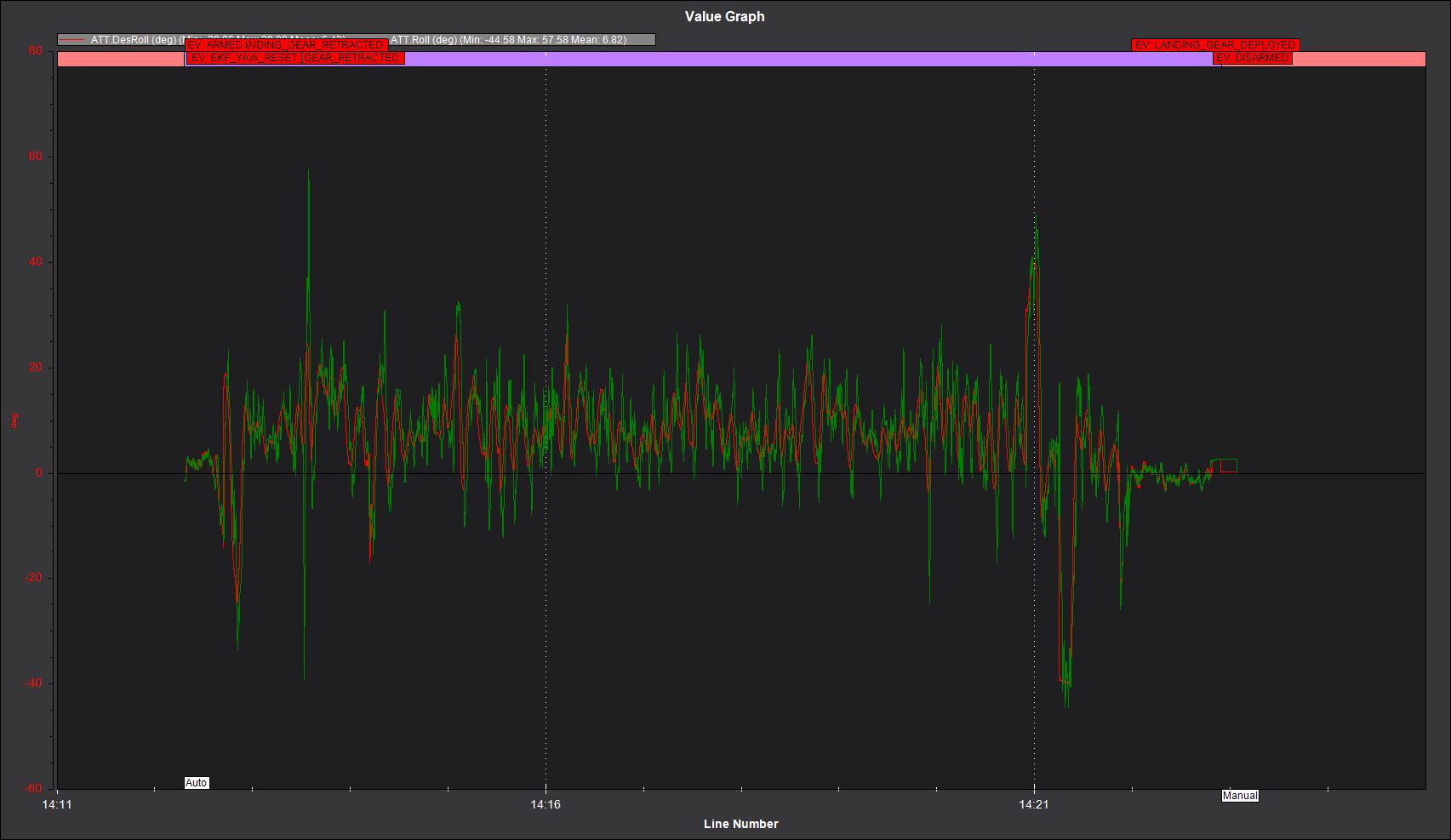
i have 2.4m wing length VTOL frame which i performed autotune for 2 times. Even i did twice times the Autotune with AUTOTUNE_LEVEL= 3 and later than made fine tuning as well but i was not satisfied with the final flight of my UAV as it is seen on below graph. It flies quite well in a cruise straight flight with small oscillations but in loiter phase or occasionally it produces high roll angle action and seems like controller has overshoot and overcontrol as well. I tried fine tuning and followed the instructions related to the link(1) below and the results was not good again. Also the roll angle has a noisy response as it is seen below graph.
I changed the parameter [RLL_RATE_SMAX] from 150 deg/s/s to 110 deg/s/s according to rule of thumb which is mentioned in Limit Cycle Detection — Plane documentation
The limit should be set to no more than 25% of the actuator’s maximum slew rate to allow for load effects.
Furthermore, my servo voltage supply is 5v, even though minimum supply voltage is supposed to be 4.8v. I was quite suspicious about supplying 5v to servos and then i performed 5 hours torque testin order to make sure it is reliable and it passed the all tests.
I mostly suspicious about servos and noisy roll angle. I also add my flight logs to here. If anyone could give me any tips or recommendation about my situation, please feel free to send me message or write down here.
-
What could be the reason for such a noisy response of roll angle?
-
Does voltage supply effect the roll actuation?
Thanks in advance
Arduplane version: 4.1.2 stable
Autopilot : Pixhawk Orange Cube
My Servos are: RS0708 digital Servo link
Log file: