Hello All,
I will appreciate your help with this issue, as I have no idea what could be the reason for the crash. The plane WAS a flying wing NINOX from Bormatec running arduplane 3.7. It was flying perfeclty the day before, flying many times the same planned mission in auto mode, with only one minor problem: it reduced too much throttle and lost too much altitude at the start of the landing, but it recovery and landed as planned. So I made just one change: TRIM_TRHOTTLE from 45% (default) to 75%, as it was clear that it need a lot of throttle to level flying.
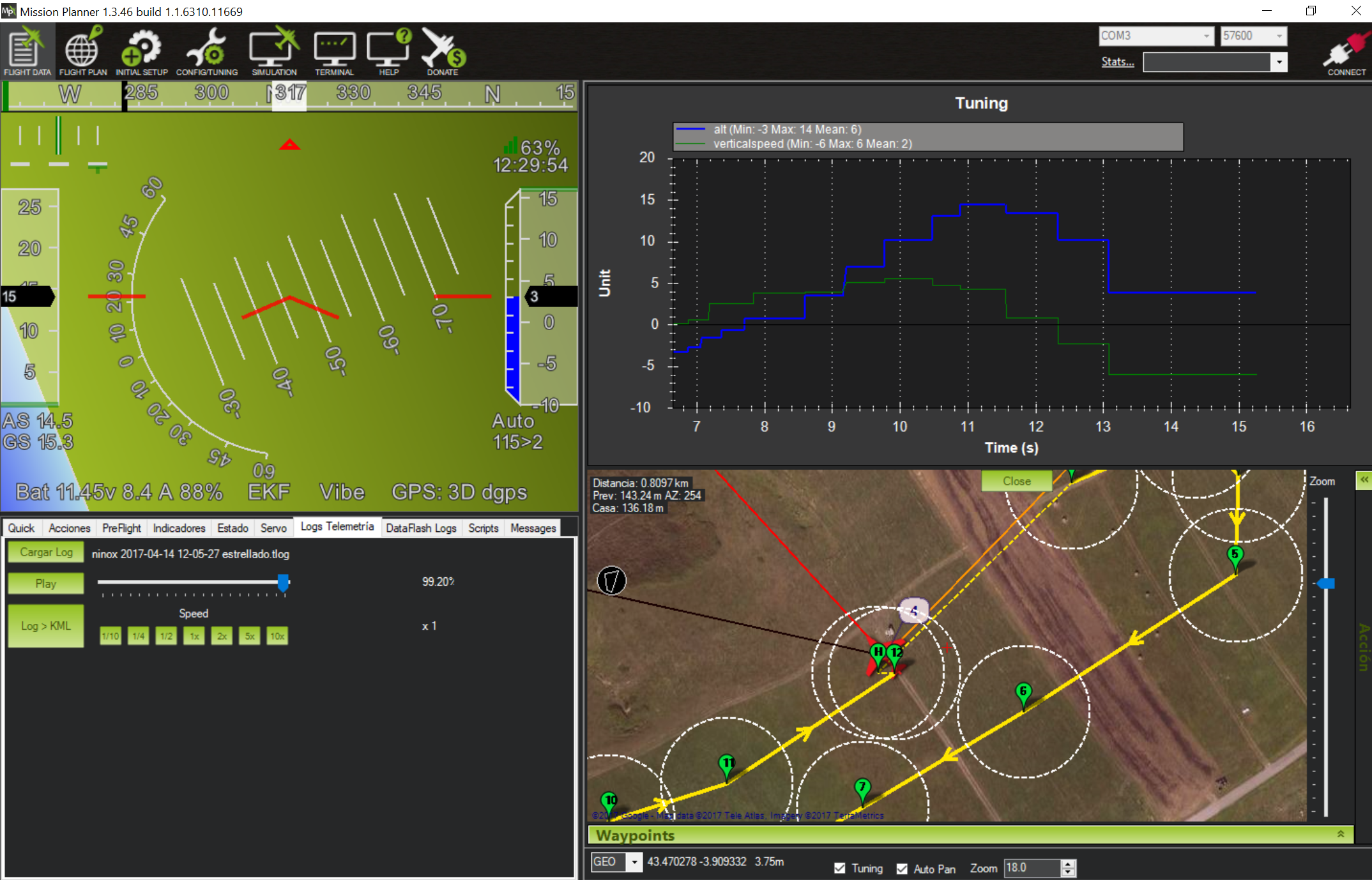
With this single change, I tried today the same AUTO mission but it behaved badly, too much speed (20 m/s instead of the configured 12 m/s) and missed most of the waypoints (I got frequently the message “resseting to the previous waypoint”).
You can see this behaviour in the attached telemetry and dataflash logs at 18…22%. The plane crashed gently, but I notice in the telemetry log that the the target altitude was not always met with large errors (+10 meters) sometimes, and, previous to this gently crash, altitude reading was negative (-8 m, which is not possible).
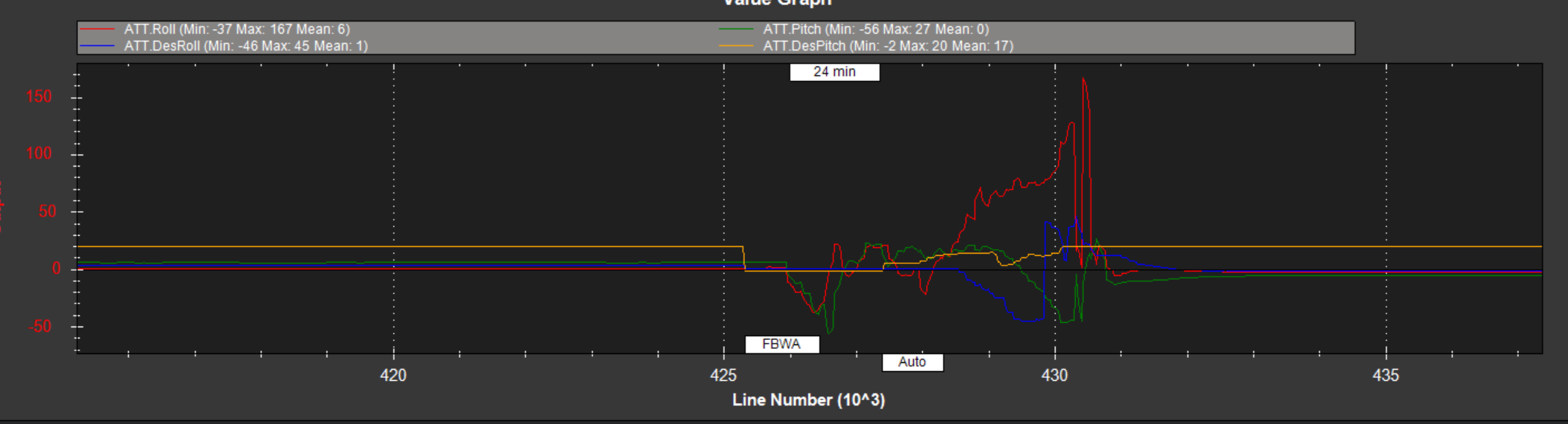
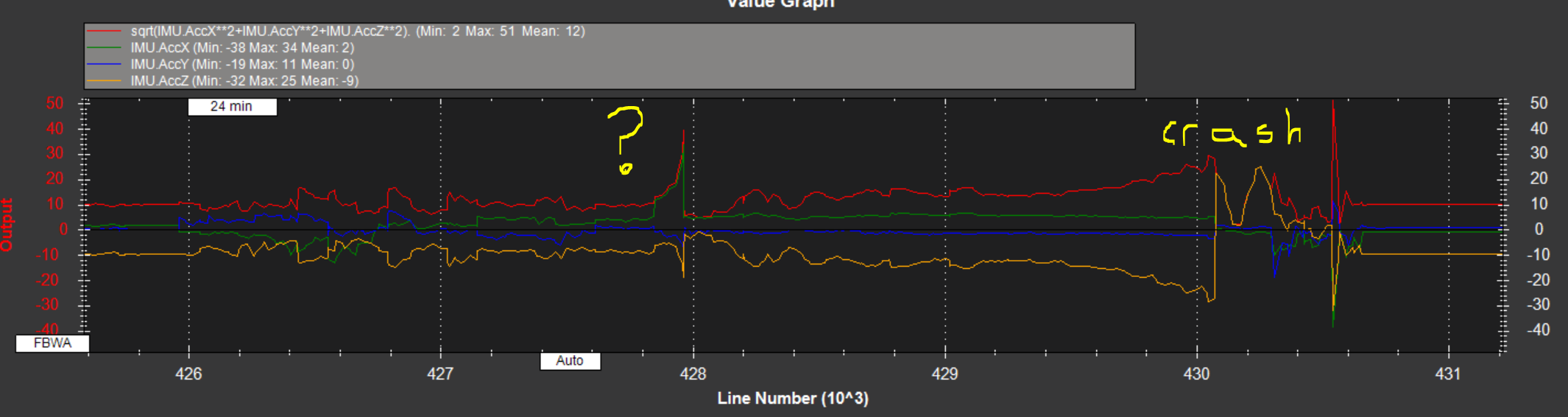
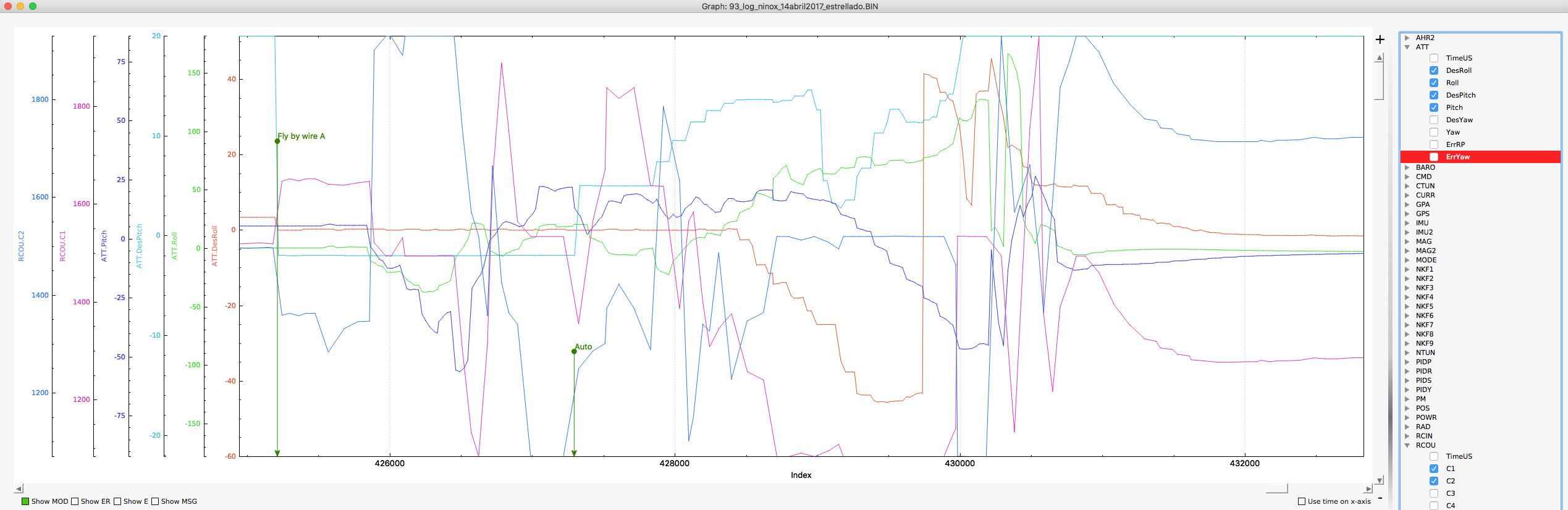
So, I decided to change the TRIM_THROTTLE parameter back to 50%, and flew it again with the same mission (starts at 98.3% in the telemetry log). Once It got the target takeoff altitude of 10 meters, instead of flying to the WP 2 ahead, turned back to me and went down almost vertically at top speed and crashed violently.
I have no idea what could be the reason. Any help will be very much appreciated because, sadly, I am losing my faith in arduplane  I really hope is was my fault.
I really hope is was my fault.
Crash is at 98.3 % of telemetry log and at the end of the dataflash log.
Thank you in advance!
Adolfo.
ninox 2017-04-14 12-05-27 estrellado.tlog (1.8 MB)
Download link for dataflash log: https://www.dropbox.com/s/8isw92hhzdr6yoa/93_log_ninox_14abril2017_estrellado.BIN?dl=0