The plane i assembly in Jan 2024 and last for one year,
but in February 2025 the plane crash due to slowly descend
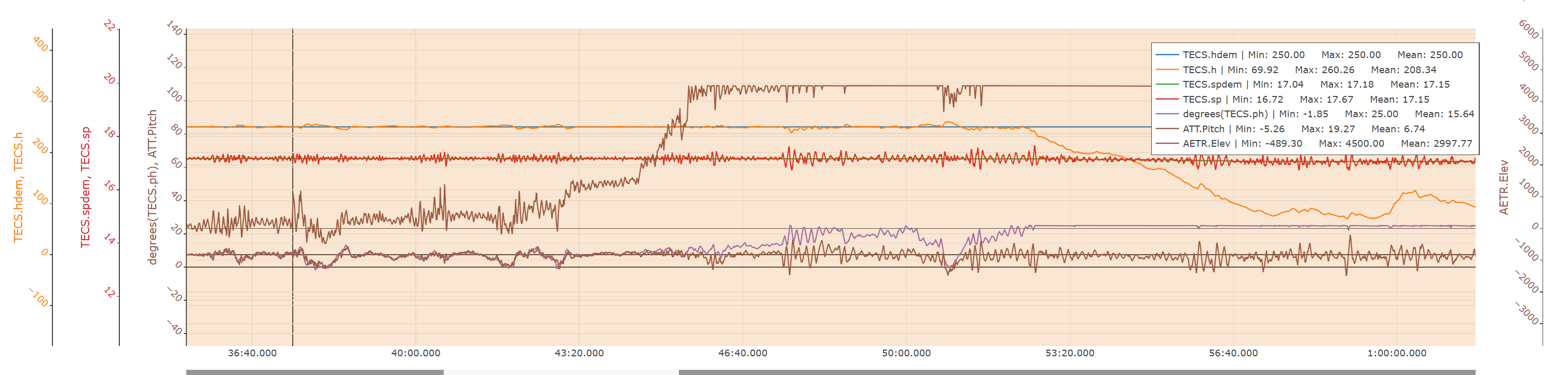
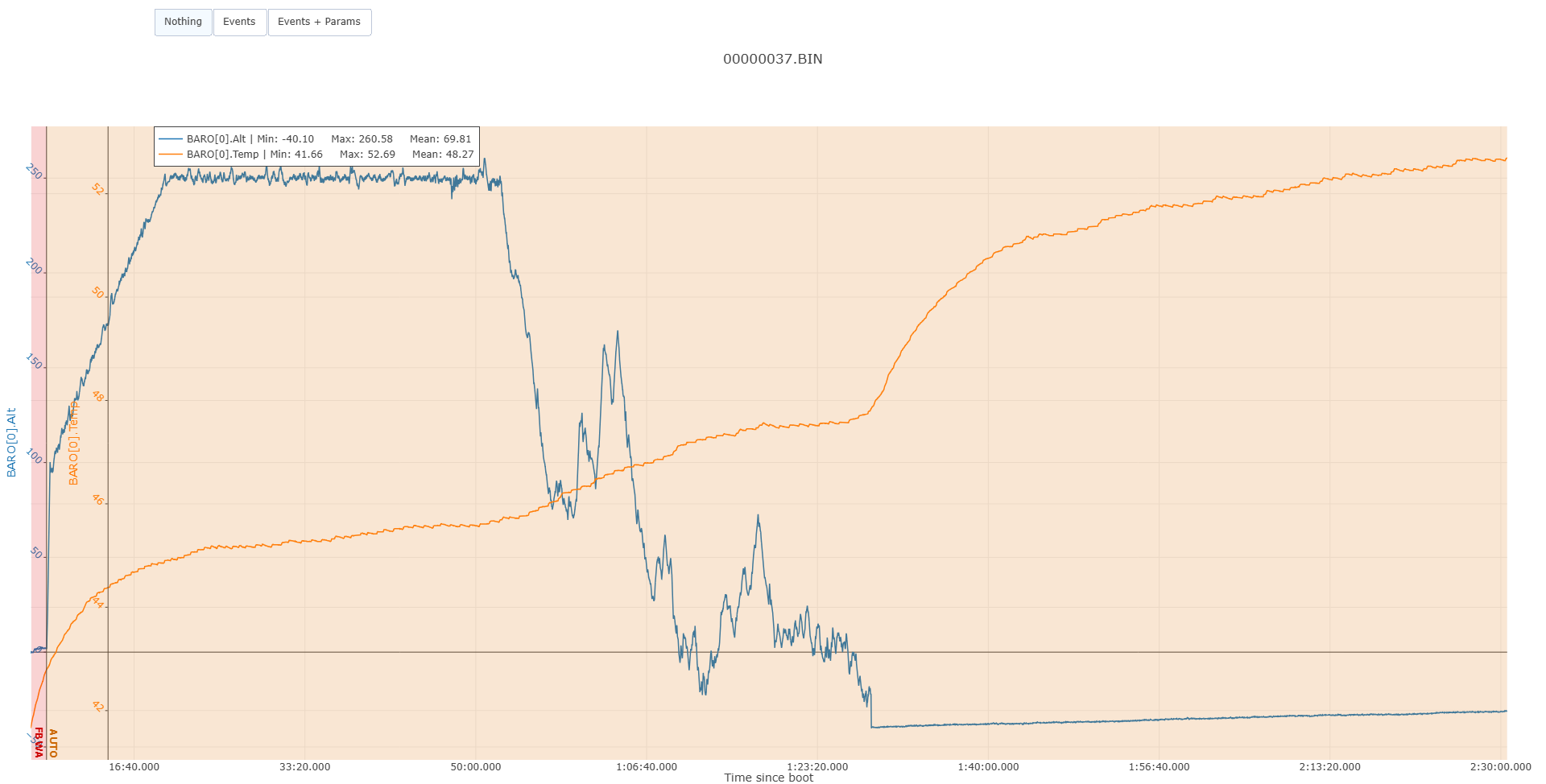
the mission was set to fly in altitude 250 m, but in the middle of auto mode set before, the plane slowly descend its altitude.
I dont know it happen, i try to analyze the log, i decided to change to main motor,
and i try to reassembly after crash, but it continue with the same case
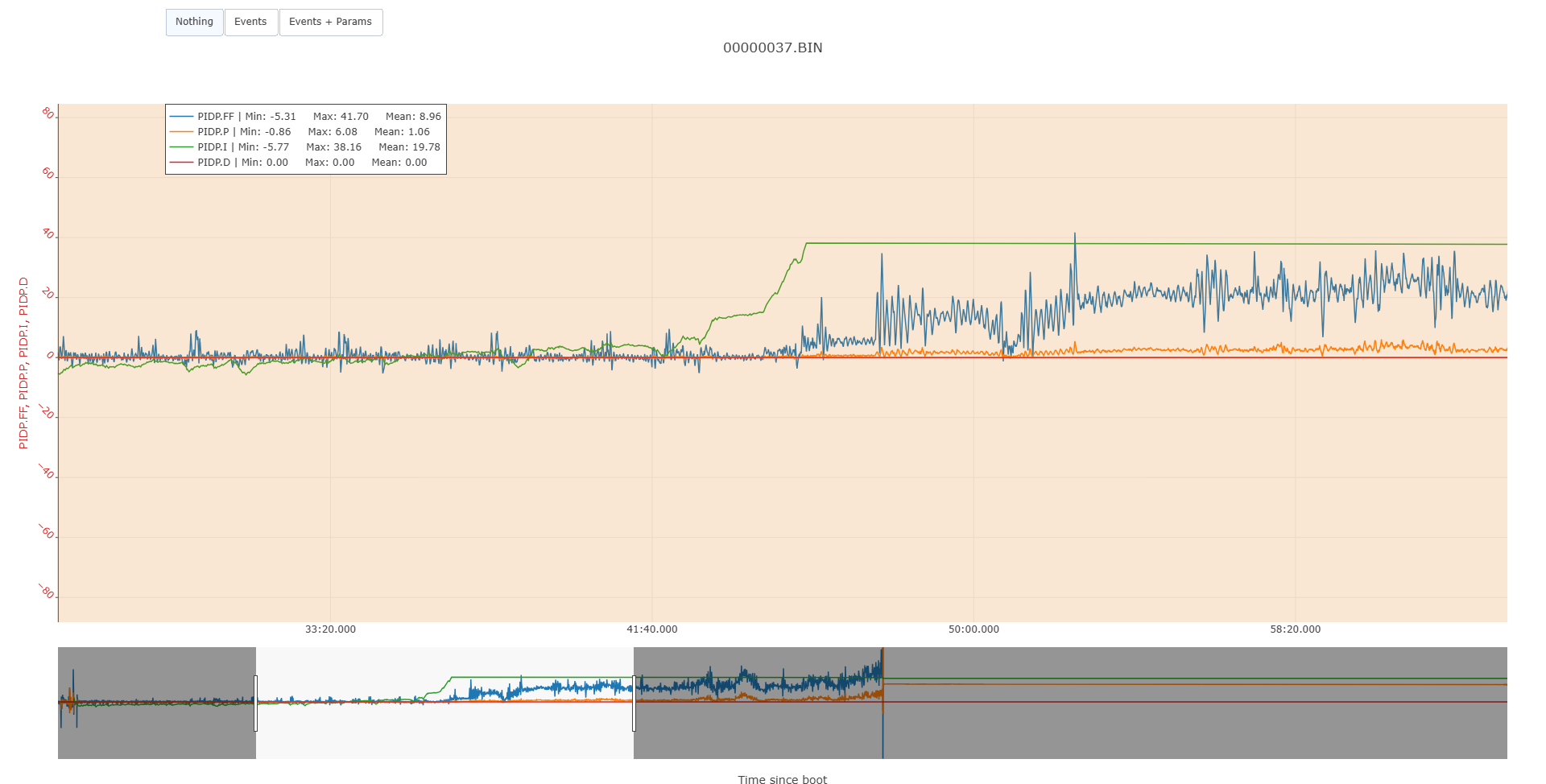
could anyone please help me to analyze this crash log?
yes, actually i aggre with your analysis. after checking the servo linkage there is no any loose connection in servo linkage, servo and all mechanism of the aileron
could you help me what about the GPS health issues?
i guess the GPS module that i ve used is no longer health
actually i have experienced the same accident, and found that there is no mechanical failure, but in that time my drone caught in the rain
could it be GPS health, since the Radiolink SE100 is not waterprof
and one thing i want to ask, could you share what application do you use to analyse that log?
seem it has better graphic scale than mission planner log analyzer
The crash actually has a pattern I guess.
It happened several flight after the drone caught in the rain.
So I guess if the drone caught in the rain this day, the crash will happened several flight after this day, or after the drone has its mission’s break for a week or two weeks before get back to fly.
Because the hardware located outside of the fuselage are telemetry anthena, GPS receiver, motor, and elevator servo; I try to change the motor and elevator servo. The GPS still not changed since I think its caused by mechanical failure. (telemetry anthena might not affect the crash)
But, after i try to fly again with another battery, the crash happened again. So I think the problem is in GPS module. Because i didnt change the GPS module.
If the GPS health in the LOG analysis is good, what can I say except hardware of GPS module failure?