Perhaps someone had the same problem:


Makes no sense… But maybe a mysterious parameter to set ?
Thank you in advance.
Perhaps someone had the same problem:
Makes no sense… But maybe a mysterious parameter to set ?
Thank you in advance.
Did another try:
Old PX4Pilot (Pixhawk 2.4.8) with M8Q-I2C-5883 show same behaviour.
Not sure what to do as flying with a non calibrated compass is a good recipe for disaster…
You will get a “Yaw (deg)” reading even without a compass. Just by the information supplied by the “gyro” chip.
Compass information on a (regular) plane is optional anyway. You could just disable the compass. Unless you need a way to find home if the GPS signal is lost.
You are correct but on the top of the screen capture compass did not move.
For ardupilot, mission compass is necessary so no unfortunately I can’t just remove the compass.
Just to be sure: you had a GPS fix and also moved the aircraft?
Rolf
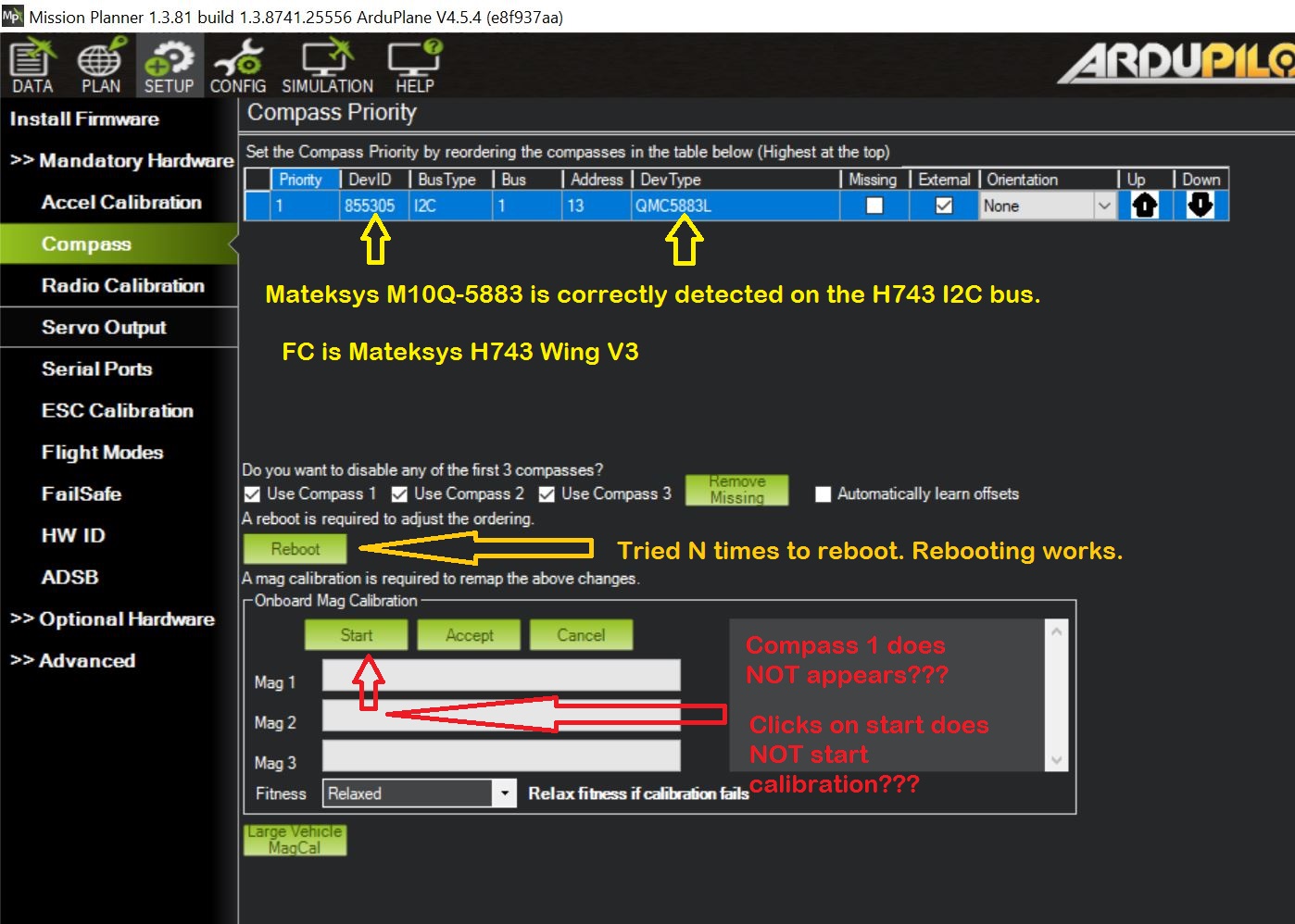
Yes I got GPS 3d fix. (you can see the 3d fix on the screen capture). I tried all possible combinations. Actually Mateksys must know about the problem as they recommend to lower the I2C clock speed to 200KHz in case of failure.
set i2c_speed=200KHZ
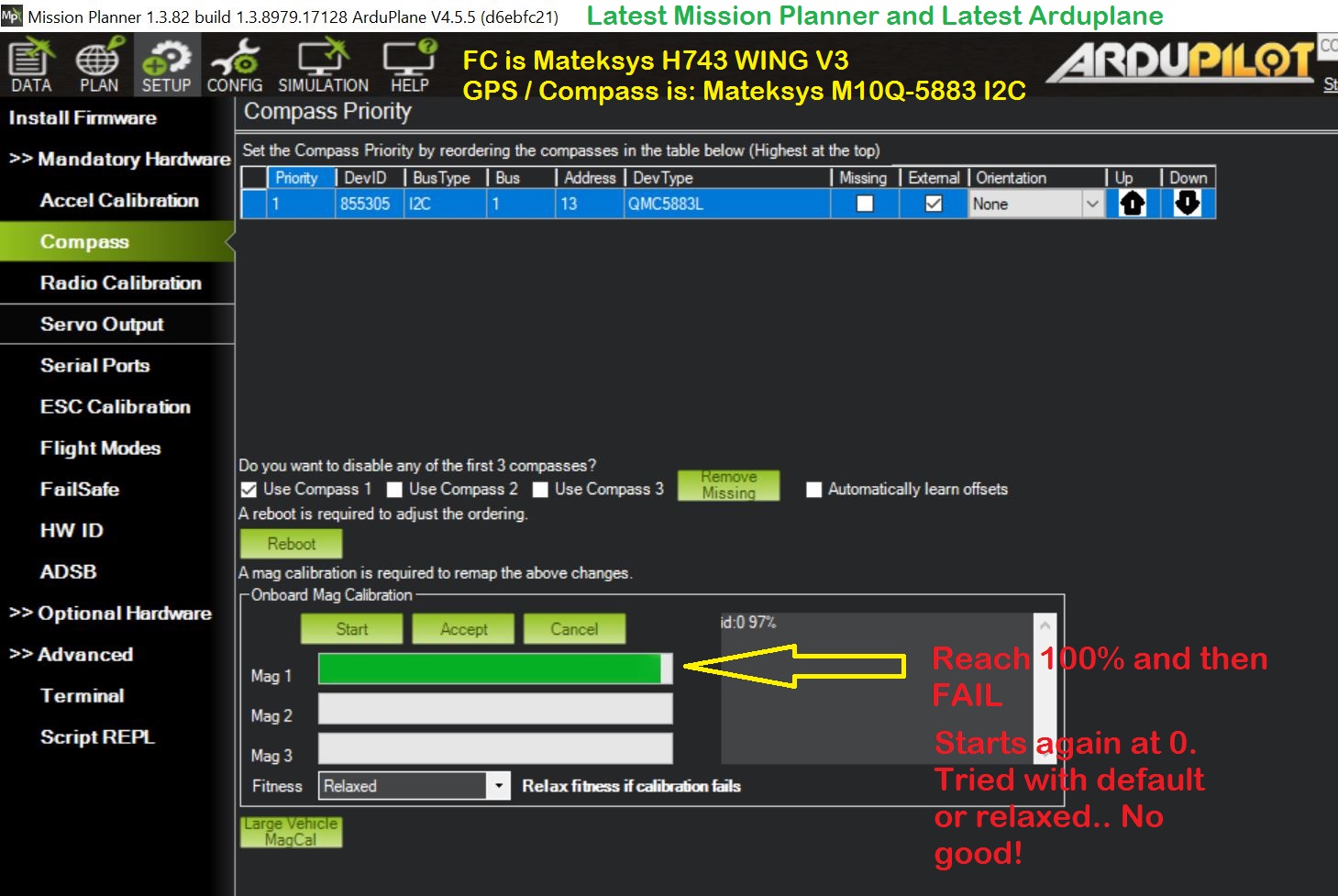
Just updated the Mateksys H743 WING V3 (4.5.4) to ardupilot 4.5.5 this morning. (2/8/2024)
Improvments: The compass calibration CAN be started now.
It failed calibrating when arriving at 100%.
Voice message: Wrong orientation. (Whatever this means)…
Tried 4 times in “relaxed” calibration mode…
Here are the screen captures: