Hello!
I’ve found the cause for a very serious crash i had for the second time now.
I’am using a Holybro Pixhawk 4 (dual IMU) with M8N GPS on a Crosswind Mini Plane, single Motor.
The crash happened with 4.4.0 two days ago and on 4.2.0 in the Summer 2022.
Root cause is a defective BMI055 or even a driver bug when reading from the BMI055.
The plane was on a mission without any notable problems running on first IMU (0). During final dynamic descent, Arduplane did a LaneSwitch to second IMU (1 = BMI055) which has its Gyro Axis mixed up since flightminute 5. Orientation was ~YAW180°, this lead to a total loss of control. I wasn’t able to switch to manual to get it back into my control but hat some luck to avoid a nose landing, so it “just” broke the fuselage once…
Took a while to finally find these problems. @Rolf helped a lot in a local community.
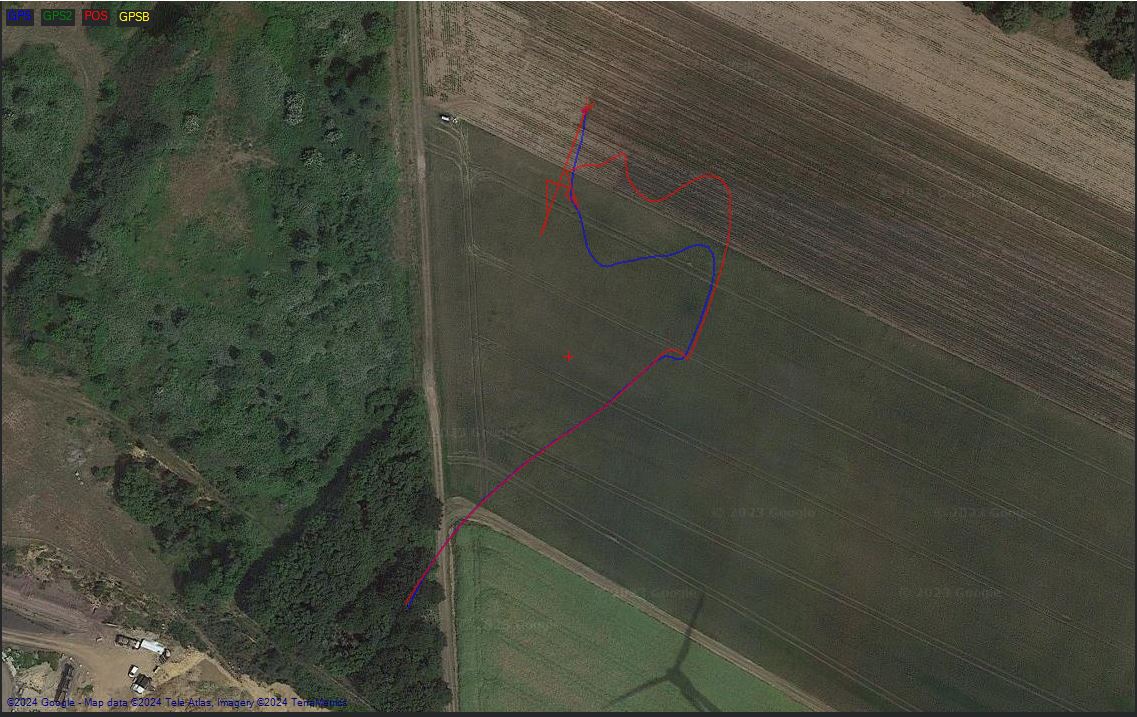
Ground Track of the landing approach, Plane came from south with headwind. POS and GPS difference!

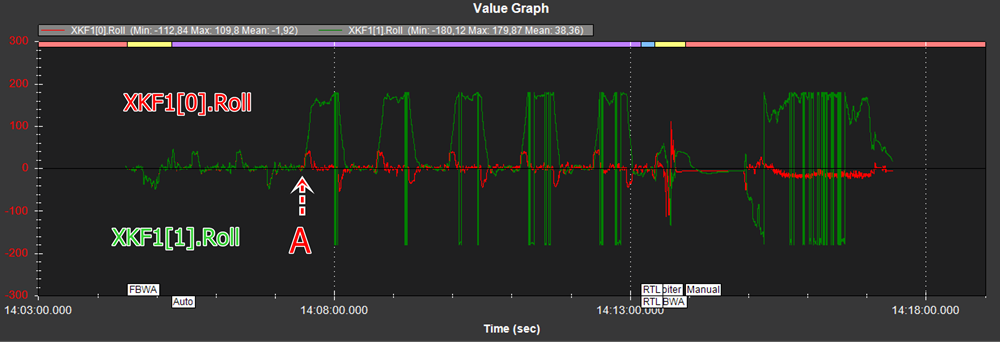
Attitude Control: You can see the moment of the LaneSwitch shortly before the cursor. Roll and Pitch estimation suddenly change dramatically.

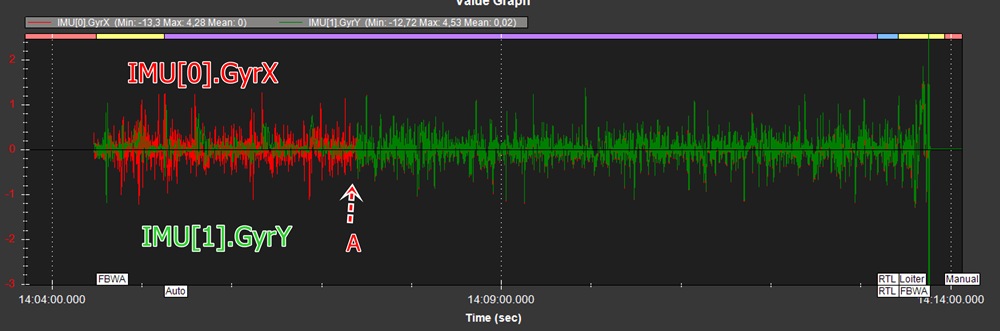
Gyro Comparision. Second Gyro Axis are mixed up:
X->Y
Y->Z
Z->X

Moment of the second Gyro AXIS-SWITCH at 4.53.5
Another example of a longer flight:

There where 3 Gyro switches in this flight. First to the above variant “A”, later to another mix up “B” and back to the correct squence.
Honestly there are 2 big problems:
- A Hardware defect on the IMU or a driver bug.
- A very bad EKF3 behaviour which switched to the bad IMU although it was already marked as unhealthy.
I hope some of the devs will find a solution for this. I can provide several original logs per DM.
Here is the recent crash log with random GPS:
Thanks and best regards,
Yannick