tridge
October 19, 2022, 2:32am
22
I’ve just released plane 4.3.1beta1. This is a minor update with some useful enhancements and fixes:
fixed build with gcc 11.3
fixed random number generator in lua core
scale VTOL angle P with airspeed in quadplane back-transiton
added support for implementing AUX functions in lua scripts
fixed BMI085 accel scaling
fixed KSXT NMEA parsing affecting position resolution
fixed race condition in TECS control leading to ‘nod’ in forward transition
allow for expansion of notch filters to fix notch of fwd motors in quadplanes
added logging of TECS target alt
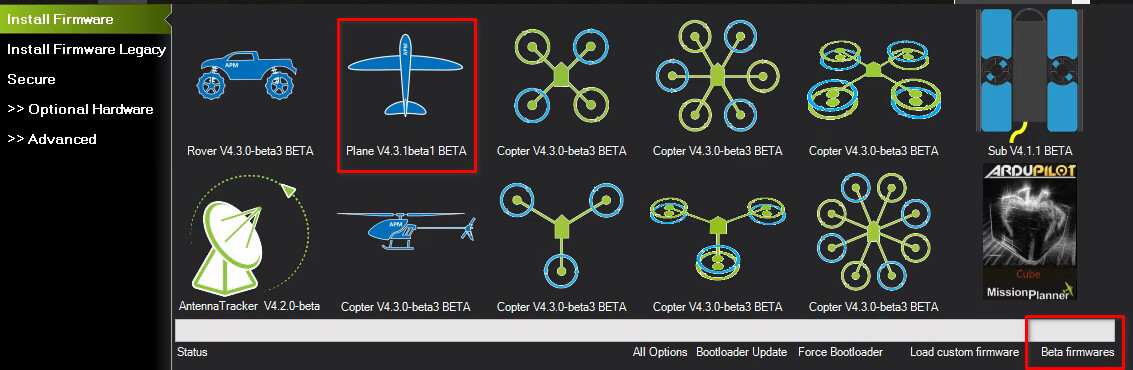
In case you are not familar with loading beta releases, this is how to do it with MissionPlanner:
Please test and report back!
1 Like
MartyMcFly
October 19, 2022, 6:58am
23
Sterling work as all ways Tridge,thank you
xixijoe
October 19, 2022, 8:17am
25
@andyp1per it is Matek F405wing
andyp1per
October 19, 2022, 8:55am
26
Ok, here is a build with tramp debug turned on for Plane 4.3. Unzip it and upload the apj to your board using mission planner:
arduplane.zip (651.8 KB)
To see the debug you will need to use mavproxy - MAVProxy — MAVProxy documentation - please try it and show me the console output.
aeolus
October 19, 2022, 9:11am
27
4.3 No problem so far. Thanks.
xixijoe
October 19, 2022, 2:18pm
28
I am sorry I don’t how to use mavproxy. here is what I get.
MAV> Traceback (most recent call last):
andyp1per
October 19, 2022, 2:45pm
29
Are you on windows? Did you use the .exe installer?
xixijoe
October 19, 2022, 3:38pm
31
yes mine os is windows 10. installed under program files X86. run Mavproxy. while 405wing connected to Mission planner. run Mavproxy, the white window pops then click Mavexplorer then click Open. then I got info on the black window.
andyp1per
October 19, 2022, 10:04pm
32
You need to do “add link”:
xixijoe
October 20, 2022, 1:03pm
33
when I click Mavproxy. here is what the blackwindow showes,
Auto-detected serial ports are:
andyp1per
October 20, 2022, 1:10pm
34
Ok, can you try doing this immediately after the board boots to see if there is any tramp output?
xixijoe
October 20, 2022, 1:23pm
35
OK,this is what i got
Auto-detected serial ports are:
andyp1per
October 20, 2022, 1:29pm
36
Can you post your full parameter set
xixijoe
October 20, 2022, 1:31pm
37
yes sure. please check it.
andyp1per
October 20, 2022, 1:34pm
38
There is no tramp setup in those parameters
xixijoe
October 20, 2022, 2:19pm
39
sorry,I did not do param restore after the firmware flashed you sent to me. I have done it check it pls
andyp1per
October 20, 2022, 2:22pm
40
Ok, please now do the mavproxy test again
xixijoe
October 20, 2022, 2:41pm
41
Do i need to power the FC with the battery or only USB cable power. is VTX needs to be connected if it is battery powered?
andyp1per
October 20, 2022, 2:43pm
42
VTX needs to be powered. Most VTX’s require battery power to work - but not sure whether yours does