I observe that the value of these parameters has changed from 0 to 75
Q_A_RATE_P_MAX
Q_A_RATE_R_MAX
Q_A_RATE_Y_MAX
I observe that the value of these parameters has changed from 0 to 75
Q_A_RATE_P_MAX
Q_A_RATE_R_MAX
Q_A_RATE_Y_MAX
right, we changed the default of those as we observed some logs where the rate demand was unreasonably high. A value of zero means no limit. Very few quadplanes really should be using over 75 degrees/second.
but then the slow (360) medium (720) values are too high for quadplane, maybe only for Tailsitter?
Dear tridge
First of all, I would like to thank you all the great work you are continuously doing, ¡Thanks so much!
I have been following the evolution of “quadplane firmware” and, recently, I have decided to emulate the way you proceed to simulate new features using SITL in combination with RealFlight. I own two quadplanes (both tilt tri vectored yaw) and would like to upgrade their firmware in order to use Q_RTL_MODE = 3, in order to get a smoother behavior and reducing power battery drawn.
I tested on SITL Plane versions 4.1.1, 4.1.2, and 4.1.3 Beta 1, on the Griffin model, and in all of them I’m getting a non desired behavior. The test flights conssit on taking off and flying towards a waypoint 1 to 2 kilometers far away from home, at an altitude of 120 meters. When the waypoint is reached, I change to QRTL mode, and between 200 and 300 meters before reaching home, the plane touch the floor trying to reach ALT_HOLD_RTL altitude.
These are the parameters I use for QRTL (mode 3):
Q_RTL_MODE = 3
Q_OPTIONS = 0
Q_RTL_ALT = 6
ALT_HOLD_RTL = 1000
WP_LOITER_RAD = 100
RTL_RADIUS = 0
I also tested with ALT_HOLD_RTL = 1500 and 2000, and in both cases it flies 10/11 meters under ALT_HOLD_RTL altitude, and then reaise up to ALT_HOLD_RTL. Following video demostrates the behavior for ALT_HOLD_RTL = 2000:

Thanks again.
OK, thanks @tridge,
And speaking about default values, Are these high values also for these parameters?
Q_A_ACCEL_P_MAX
Q_A_ACCEL_R_MAX
Q_A_ACCEL_Y_MAX
Now almost I’m familiar with various VTOL landing method with RTL and QRTL.
I have set following parameters as follows.
RTL_AUTO_LAND = 2
Q_RTL_MODE = 1
ALT_RTL_ALTITUDE = -1
with above setting when I gave RTL command it was perfectly following the waypoint after DO_LAND_START with relative altitude set to that waypoint.
For examble way point next to DO_LAND_START was set to 60 meter.
My plane was about 2km way from my landing point at an altitude of 200m AGL.
When engaged RTL or QRTL , plane was start decending from 200m and 2km way for targeting to the 60m AGL.why it’s not following ALT_RTL_ALTITUDE which my setting was maintain current Altitude when RTL trigger.
It’s bit dangerous for the plane to landing in unknown terrain or incase flying near tall buildings or structure.
This same scenario will execute when GCS or THR failsafe triggered RTL.?
But when I change Q_RTL_MODE = 2 it’s workes as expected but in this mode it’s keep circle decending toward the landing point which doesn’t follow the DO_LAND_START waypoins .
[quote=“Steven_Young, post:139, topic:76507”]
I opened Log viewer and it appears I did not switch back into FBWA from loiter after transition but only Nudged Loiter. before it returned to it original loiter circle. So probably not so strange.
Do we have a way to view wind direction? I’m really concerned about my transition to from q hover to FBWA in Bin 119 - hoping it is just a tail wind transition.
[/quote]Parameters suggest that throttle trim and throttle min are both 1050, so either a poor radio calibration on my behalf or random parameter change. Either way I can solve this problem and move on with some tuning.
yes, the EKF has a wind estimate in NKF2/XKF2 in the VWN/VWE fields
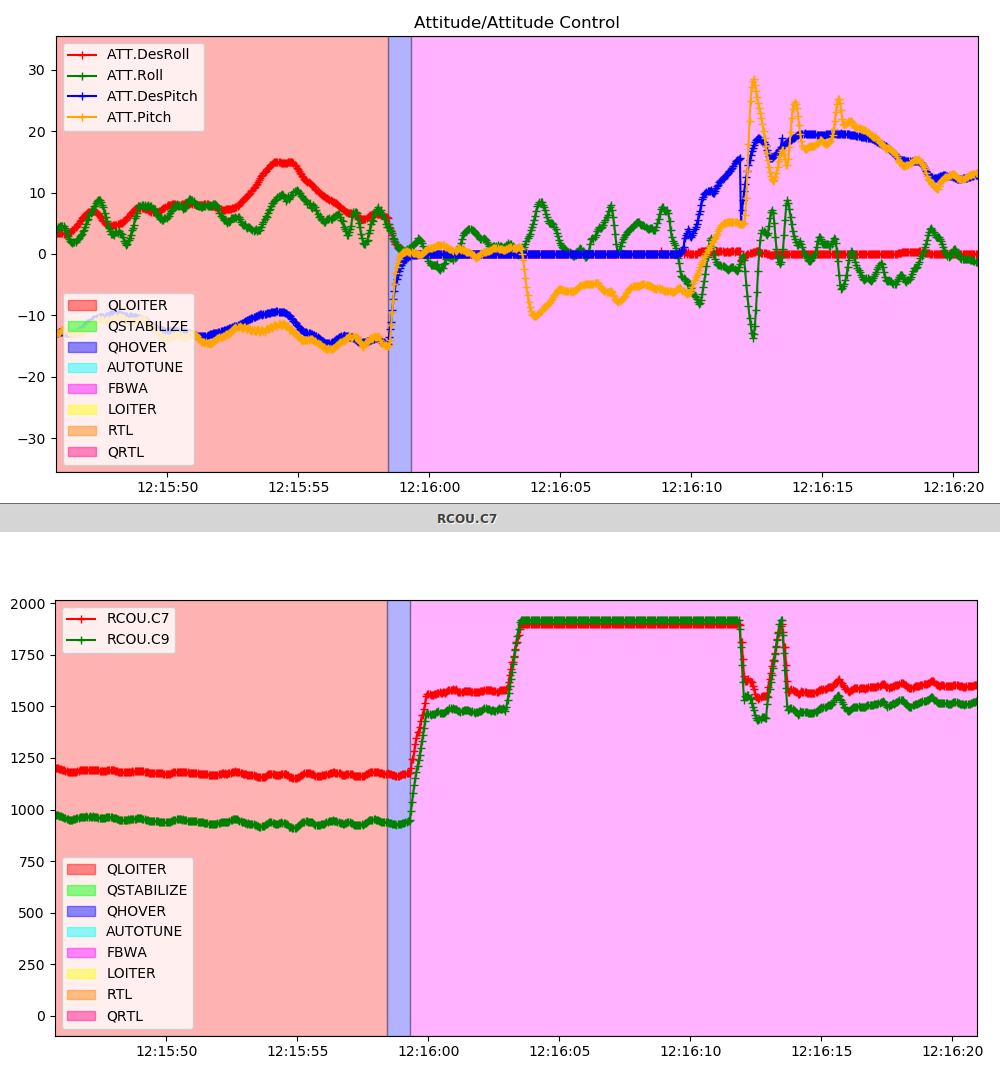
Sorry to ask again but I can’t confirm what happened from1215-1216 in the attached log. I would really appreciate if some one is able to look at the attached log. To identify why I lost altitude after transition from Q-Hover to FBWA.
Thanks in advance
your Q_TILT_RATE_DN is too fast:
Thankyou, Tridge
I’ll have a look, if there is default I’ll set it to that.
Take care
Steve
Thanks Tridge I adjustd Q Tilt Rate down to 45…and Q Tilt rate Up to 150 ( from 200 I figure this will be a little gentler).
Take care
Steve
Hello!
I’d activated min ground speed feature by setting MIN_GNDSPD_CM to desired value.
In the flight it leads to periodic speed (and as result, pitch) oscillating… Is it possible to have more smooth speed control with MIN_GNDSPD_CM?
Thanks!
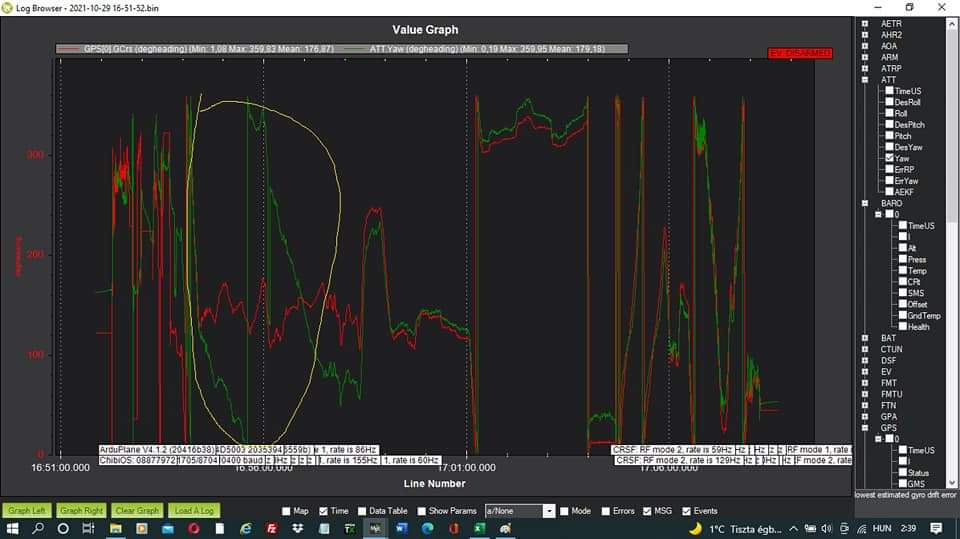
During video overlay sync i realized significant difference the real and logged heading. The gauge use ATTyaw data for dashware. I checked that original flight log and saw huge difference between GPS Gcrs data (which logged the right heading) and ATT or XF1yaw values…at the first part of my flight…circled with yellow. I ve got EKF 3 active /message before this happened.  In the second part of the flight the two values bacame almost the same again as it should.
In the second part of the flight the two values bacame almost the same again as it should.
Ardypilot:4.1.2
Fc: Matek F405wing
Log here: https://drive.google.com/file/d/1YTKw02FwOC5KCaYTfim0Kuxmzq5dy5w9/view?usp=drivesdk
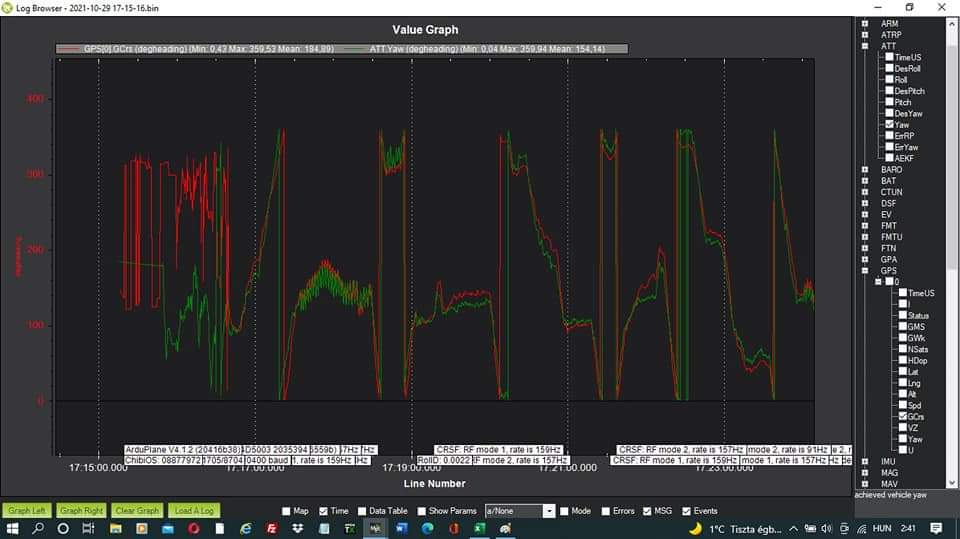
Also checked my other flights logs and there were NOT this issue the graphs runs almost perfect parallel as you can see on the second screenshot.
Happy flying!
Thanks Tridge for all your work, For Autotune in loiter mode…Fly in Loiter mode, use RCn_ OPTION to activate autotune. Does plane remain in loiter until control inputs and auto tunes of these inputs or Does plane go into Auto tune (FBWA type control) and remain like this until RCn_OPTION is cancelled? Thanks Steve
my plane was crashed because of using EKF3,there is a bug for traditional plane which is taxi for take off,please see my post before,I hope it can be used EKF2 in the new version
You can build yourself version with disabled EKF3 (e.g. ./waf configure --board omnibusf4pro --disable-ekf3 …).
I’m using it that way too for version 4.1.2 as I’m getting Bad AHRS messages from EKF3 when used with no compass for fixed wing on Omnibus F4 pro board, even I’ve tried to disable compass with all the options I’ve found.
I’ve also changed EK3_SRC1_YAW parameter to GPS instead of compass but it didn’t help for EKF3. EKF2 works just fine for me.