You can share the same port Rx6 +Tx6 (SBUS + S.PORT). Just try it, you will see it works 
When you use the DBshot then the Rx6 is taken ( because of the timer) then you need to use another UART for the SBUS, that is why I select the F.PORT (you dont need the Rx6, just the Tx6).
Thanks for the tip, i did not know that!
Here you are, the tlogs and log bins:
FPORT with no issues in FW 4.1.2 if no Bootloader upgrade from 4.0.9
https://drive.google.com/file/d/1gCplrztfJvhKcQA4eXxpdsuWoi1Xykjr/view?usp=sharing
FPORT issue in FW4.1.2 including BL upgrade.
https://drive.google.com/file/d/1gHeaiG1HpJ_SZT5hf0fF5hHh2rSU-IV0/view?usp=sharing
cheers!



@tridge I updated a Matek F405 WSE and a Matek F765 from 4.1.1 to 4.1.2 and both would not arm asking for the accelerometers to be calibrated again. I compared the Params and they all came across. What causes the board to decide to request a new calibration?
that is not expected. There were no changes that should trigger the accel cal not to be still valid.
Has anyone else seen this?
Have you updated using Mission Planer or STM32? If you use STM32 and do a full flash erase you loose the calibration data.
I used MP, the F405 WSE was not updating properly so while it was downloading the hex I disconnected and reconnected the usb and it worked. The F765 updated as expected. I compared both boards with params before the update and everything came across correctly.
Since I updated to 4.1.2, I can not connect via wifi (TCP). I have to disable MavFTP with BRD_OPTIONS=3 for it to progress. Has anything changed in the last AP version?
By USB it works correctly but not by TCP.
I had a VTOL flight (auto and FBWA modes) on a Volantex Ranger quadplane, using plane 4.1 stable. Prior to this flight I had just tuned the fixed wing and I was using default quad PIDs/settings.
The flight was good enough for me. The quad motors saturate in Qstabilize mode. I attribute this to the high altitude for my flight area (1680m asl) and there being some winds during this flight. But here is the datalog.
https://drive.google.com/file/d/1aYDt6cCKUNNiM4iXSr7pohPYOHIZcX8i/view?usp=sharing
What would you improve on this flight?
@tridge Hi I am enclosing this issue as it has been quite troublesome I am not able to connect through my ubuntu VMware and I found the other user found the same issue and I am just stuck with the errors and I gave up completely. Tried a lot of things but not successful hoping if you could help with regards to it. I am enclosing the link for the thread which has the details.
Hello!
Can you please recommend me how to debug “Bad AHRS” messages?
It is pretty annoying while using Yaapu script
Thanks!
My recommendation: Clean the AHRS_TRIM_X,Y and Z = 0 ; Do the gyro and acc calibration, dont do the level at this point; Check if the Compass has the correct Orientation, folllow the wiki and verify how the mag values should behave when rotating the aircraft; Check if the Compass is in the same ground level reference as the AP, if the compass differs some degrees maybe its better to have a custom orientation.Verify that you have satelites and you aquire “Home” message; Check now if you continue to have the “Bad AHRS” warnings.
I think I may have the same issue that others users are mentioning regarding FPort. I did a maiden today and it was constantly going into Failsafe. Now, I did realise after the flight that my power setting on my R9M was low so perhaps it was caused by this. However, I do not see my RSSI drop low in the logs and it also seems to come in and out frequently, even when very close. I attach the video and the log below:

https://drive.google.com/file/d/1Tlx7P5iZtAIAHikSE21eBWYkZhjjg8b0/view?usp=sharing
Also, I did post this in another forum message but I cannot discover any sensors, it only shows GPS. However, when running the yapuu script, I see everything - very strange. Not sure if its related.
Hi, this is expected, it’s a feature not a bug ![]()
1 Like
Hello @tridge ,
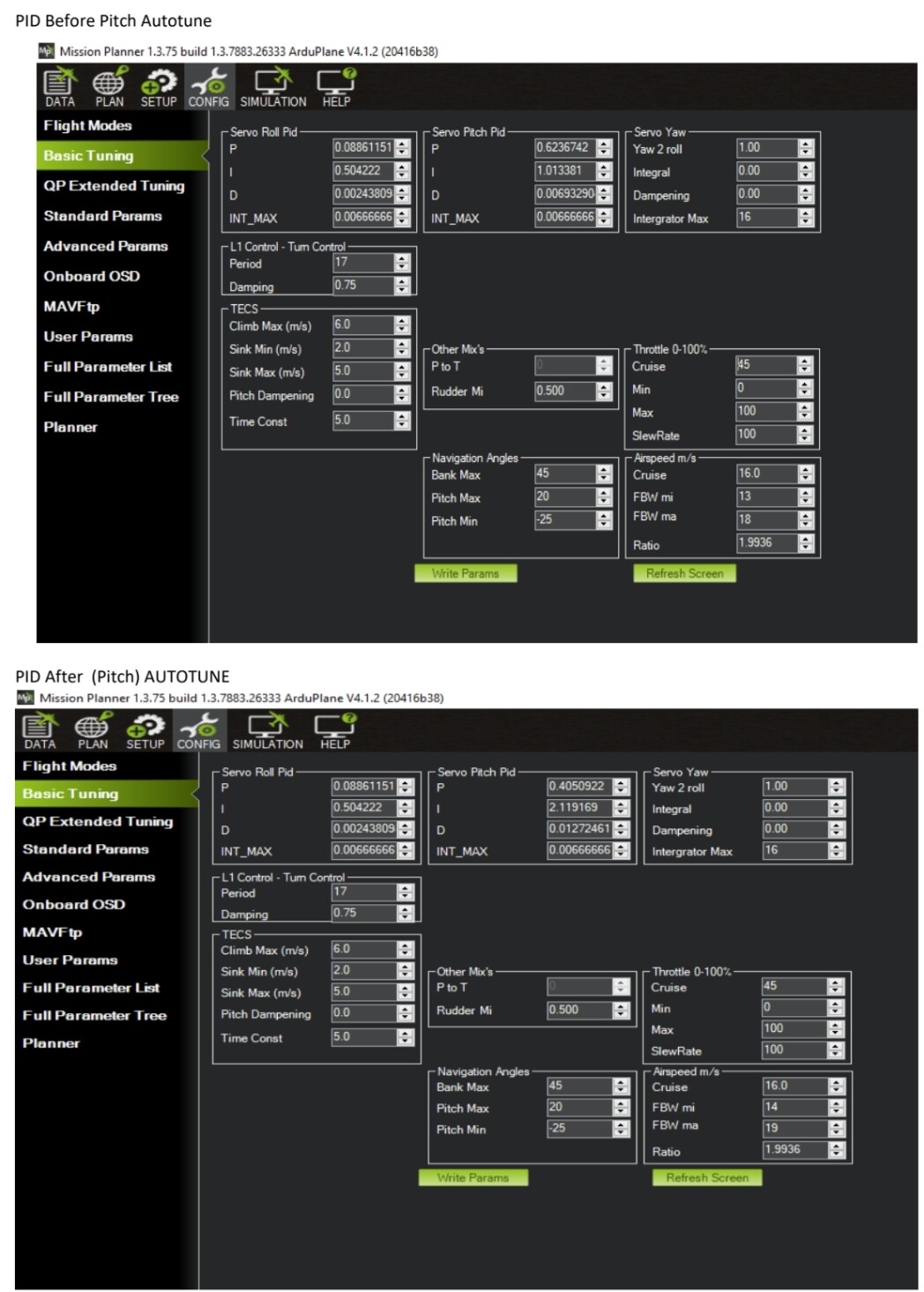
I have done AUTOTUNE my 8kg VTOL (4+1) using both FW. Stable 4.1.0 and 4.1.2. For both Roll and Pitch. I am very surprised that the after Autotune Values are really “Weird”… Now the P value is really Much Smaller than I value bor both Roll and Pitch, is this normal ??
With this “Weird values” I run missions Auto mode, and it is quiete stable…Please advise should I do Autotune again, or just do manual adjustment?? I share the PID before and after AUTOTUNE here (my last Autotune). Actually I did Autotune twice and the last Autotune make I value even bigger…! Thank you
Here is the bin log…https://drive.google.com/file/d/1oor4kNlWO_V2pwjlaw4vs2m7gaFQBtdg/view?usp=drivesdk
…
Autotune Atomrc dolphin. After first tune it was a little twitchy. But after second it fly better.
Video from first flight

video from second flight

Hi @tridge ,
Any comment on this Autotune?? Any advice on the PID is highly appreciated… Thank you…
Hi everybody
I am trying to configure Plane 4.1 for manual parachute release (via RC channel).
In previous versions this was set by CHUTE_CHAN parameter.
Digging a bit into the code I guess this functionality was moved to RCn_OPTIONS, but I cannot find documentation on which value to use for enabling manual parachute release.
Help much appreciated.
Regards,
Janez Langus
Hi.
Ardupilot version: 4.1.2
FC: Matek F405 wing, plane nano talon
I experienced some strange oscillation both on roll and pitch axis during my second flight.
1st flight: My first flight was normal…i made an autotune on level 5, and my gyro filter was on 28%. After i land…change battery and take off again.
2nd flight: First oscillation occured immediatly after the take of at FBWA mode…than i experinced this wired behaviour 2 minutes later started on pitch than roll also oscillated. I also noticed i got" EKF acticve" message on DJI custom OSD, right after the oscilations. When i checked my pids at home i realised that autotune (at first flight today) made only changes on Pitch rates but Roll rates was the same as i saved it a week before🤷♂️
I have never experinced this with 4.1.0 with another plane ranger g2 with same F405 wing Fc.
Here is my log bin file:
https://drive.google.com/file/d/1YTKw02FwOC5KCaYTfim0Kuxmzq5dy5w9/view?usp=drivesdk

