We use plane firmware for 25kg VTOL medical cargo drones
After several thousand flights with version 4.0.6 we switched to version 4.1.7 because of UAVCAN Airspeed sensors which were not compatible with version 4.0.6
We noticed an abnormal behavior during the horizontal / vertical transition:
-
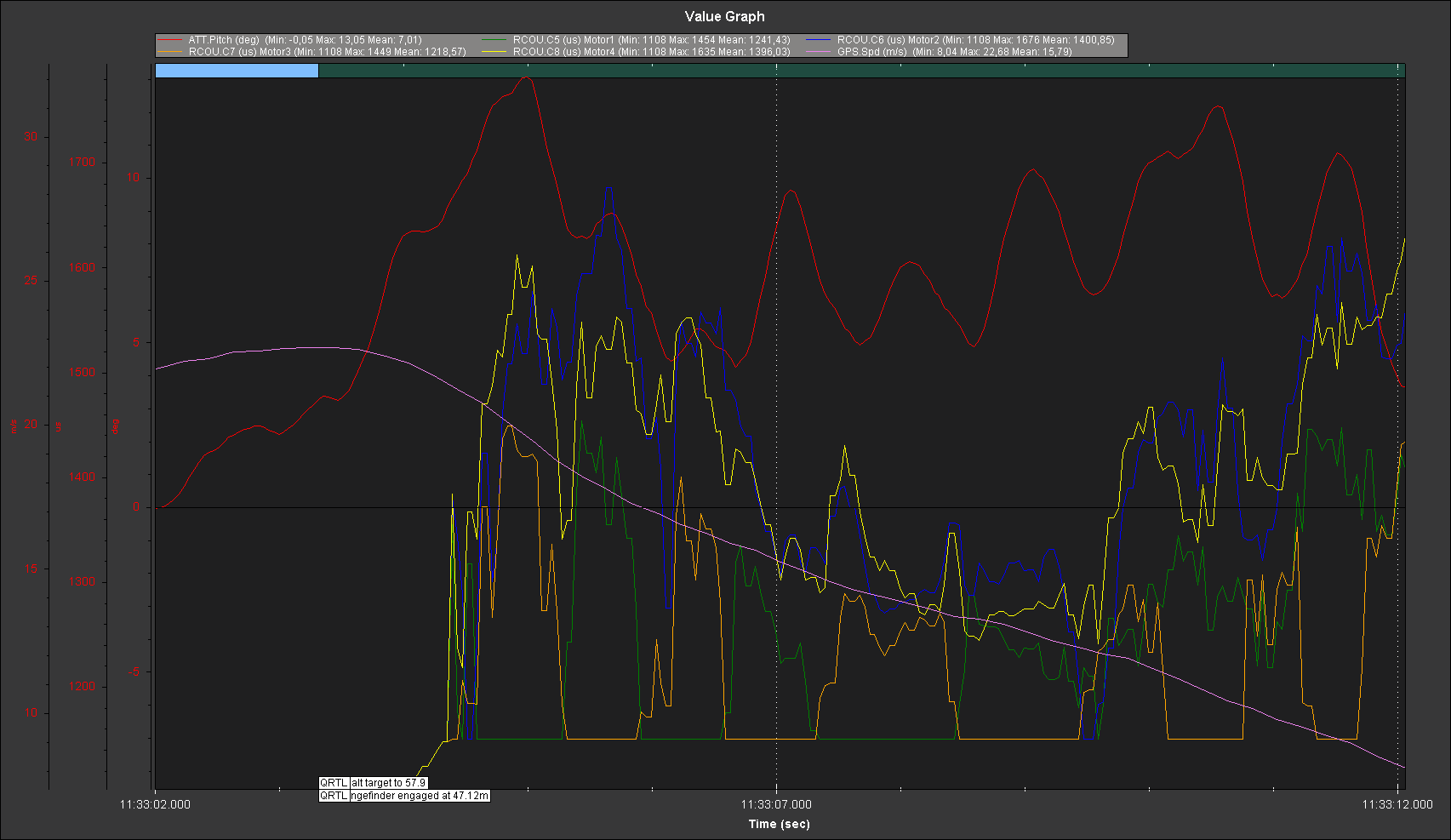
the transition is very smooth on version 4.0.6, the throttle of the vertical motors gradually increase
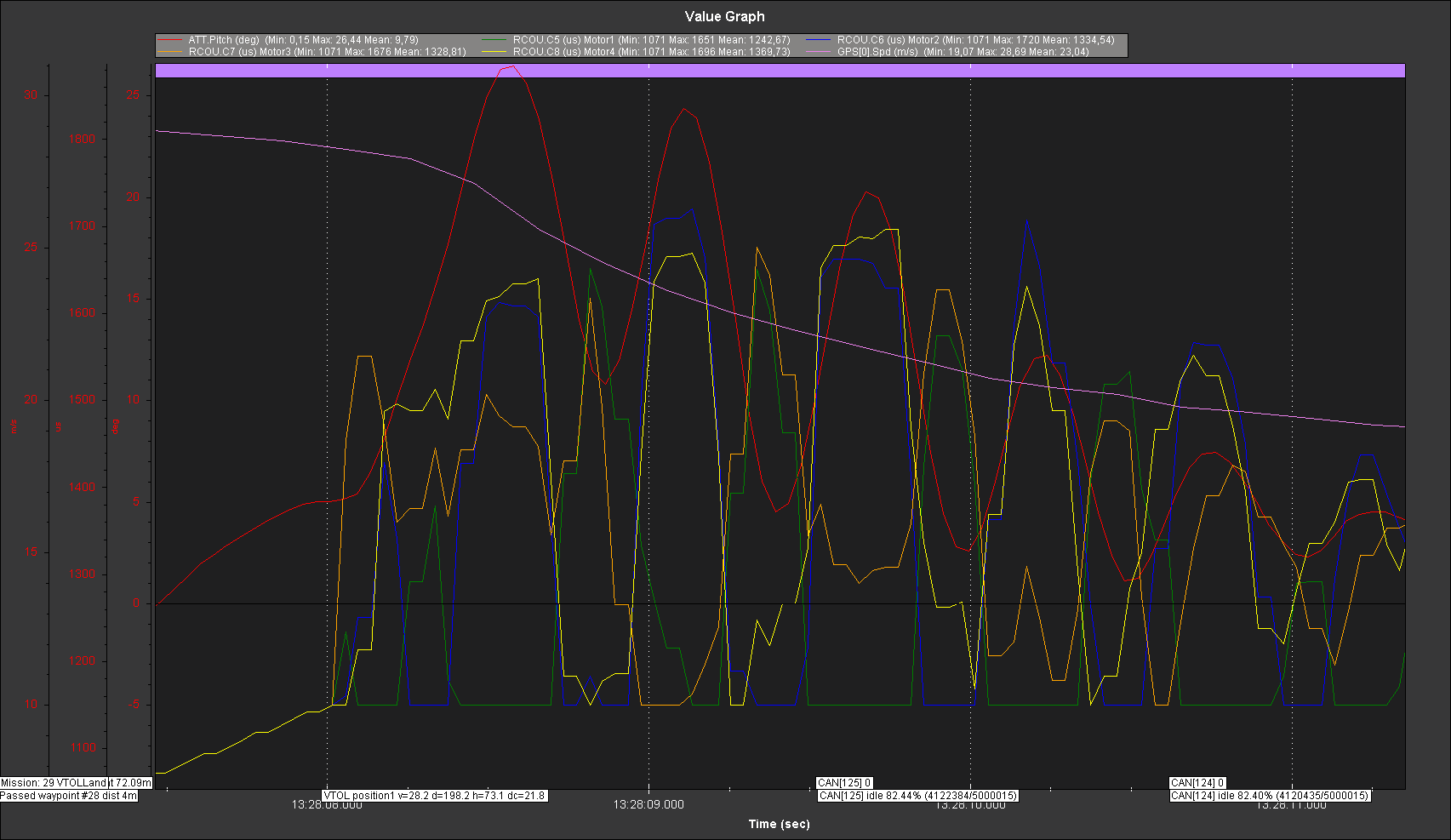
-
the transition is abrupt, the vertical motors throttle is higher, the drone oscillates dangerously for several seconds.
The parameters are identical on the 2 versions and this problem is present on all the drones of our fleet
My questions:
- Were new parameters introduced in version 4.1.7 that affect the transition?
- How to setup a smooth transition like on version 4.0.6?
I hope this comment will be useful
I thank the community for their work which allows us to fly safely and deliver medicines to remote areas in Africa