Hi everybody,
Last weekend I made some test flights with a flying wing / delta aircraft equipped with a Matek F405SE and Arduplane V4.1.7 Chibi WingF405 version flashed onto it.
For GPS I use a genuine UBLOX M8 from a Pixhawk 4 made by HEX.
I have disabled both the internal and external compasses (If I did everything right).
The airplane was autotuned and flying very very well, and very predictable.
Really the only concerns at the time where the rather large control outputs in manual / stabilized and the lack of expo but still it was very controllable.
During some later test flights, I was doing some LOS flying in Cruise in a figure 8 pattern to keep it within sight. But at times mostly when leveling out after a corner the plane started to dive by approximately 15 degrees it would just continue and not really react to any control input anymore until I switch out of Cruise and into Stabilized. In stabilized I could regain control and switch back into cruise mode seconds later again without any issues ?!?
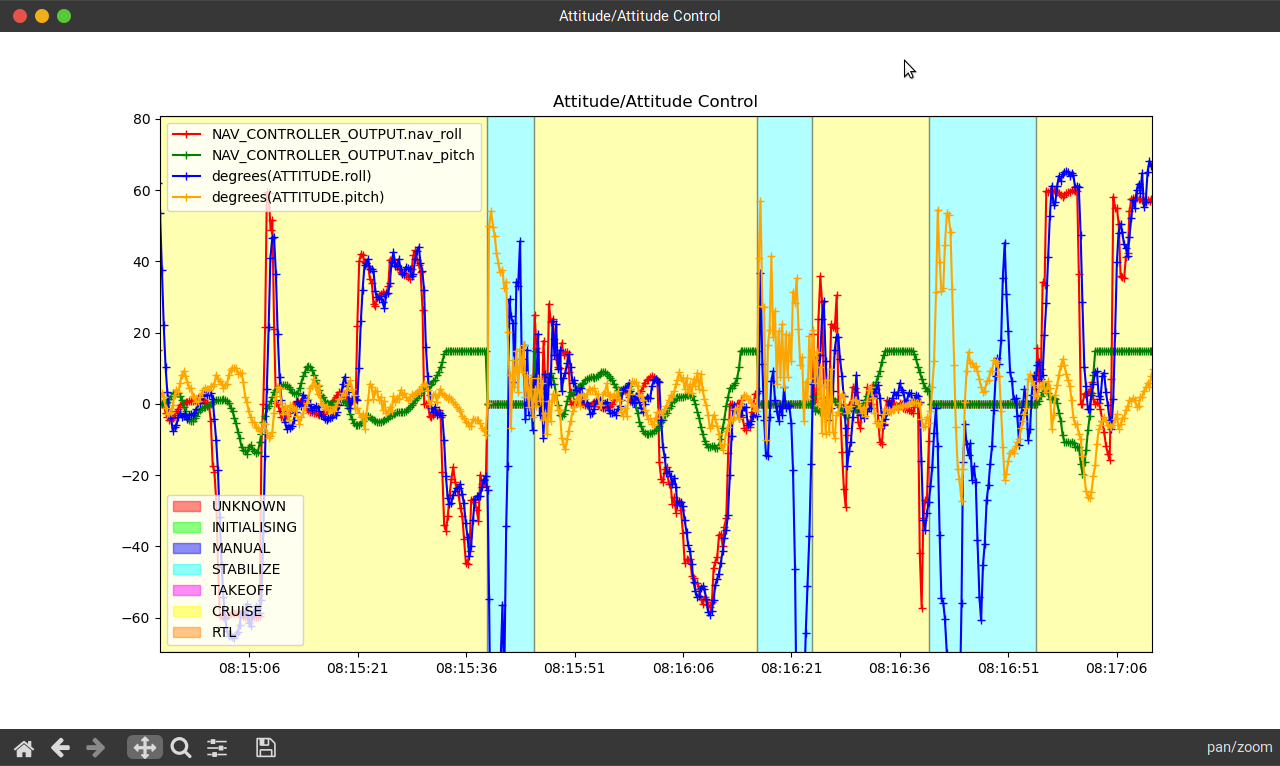
Unfortunately the logfiles on the SD where of this where corrupted for some reason. So I only have the logfiles that QGCS recorded, I was flying with telemetry on 4G so there is allot of data still without any holes. Here I can see some strange behaviour where it is constantly switching between AHRS error and normal while in the popup message I get AHRS active > DCM active > AHRS active messages all the time.
Since Iam not really sure what to look at, can somebody please put me in the right direction or maybe a topic from a related issue?
I made a youtube video from the Qground control playback of the flight: Arduplane 4.1.7 AHRS issue - YouTube
Key elements in the video are at:
3:40 Take-off everything looking normal
05:00 This is the straight line that already felt uncontrollable, it leads into the issue which is clearly visible by the erratic movements on the end. I switch to stabilize to save the plane from crashing.
05:40 second time but the exact same behaviour. The video does continue some more minutes but the same behaviour shows up all the time.
The Qground logfile and the Param file that where on the plane during this flight can be found here: Delta AHRS issue - Google Drive