the 4.1.x releases are what we call “point” releases and contain just bug fixes. Occasionally we backport low risk new features to a point release (eg. adding a new board, which is low risk as it doesn’t impact existing boards), but we don’t do major changes.
The 4.2.0 release is where the major updates happening in latest now will be released.
The idea is what all users on a stable release should update to the latest “point” release, knowing it is just bug fixes.
1 Like
Thanks @tridge that makes a lot of sense.
Hi All,
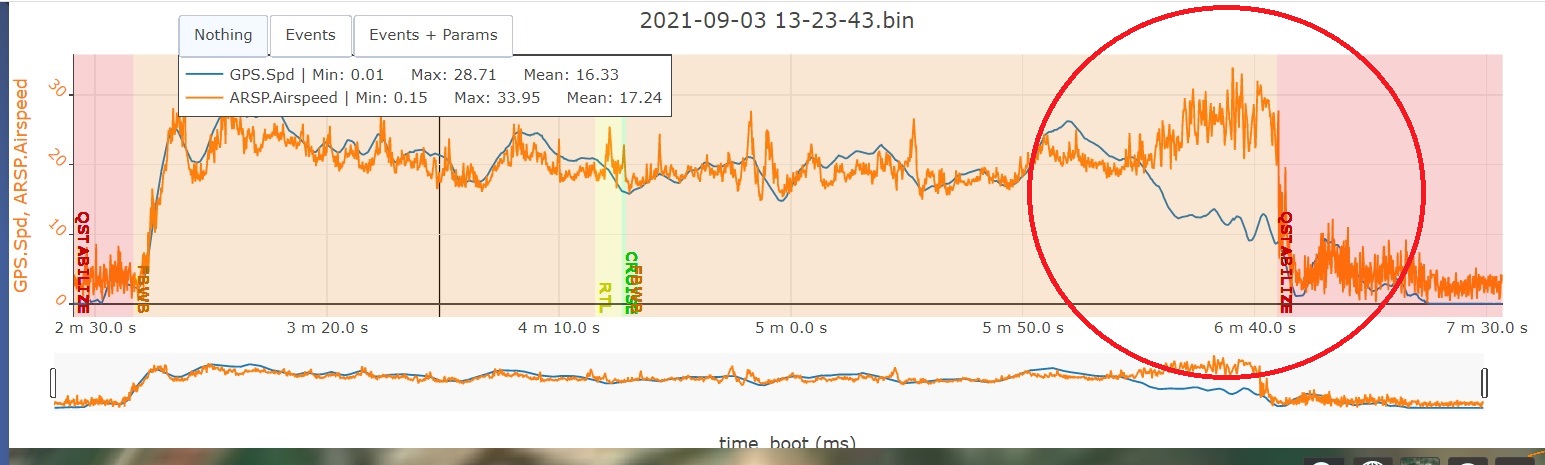
I have an issue with latest 4.1beta6 on my 2,4m VTOL quadplane (4+1 motors). Basically i can fly, transition, no problems… then after about 7-8 min of forward flight, it shuts front motor, slows down, then it stalls, until Q_ASSIST kicks in or myself setting quadstabilize so i can recover it.
The only issue i can see from log is that at given point, where it decides to stop motor, ARSPD reading seems fake (oscillating 20-30m/s) while GPS speed reflect real, so it goes down to zero, but throttle assistance seems to assume airspeed telling truth. In the previous part airspeed and GPS speed matches. I cannot see why airspeed goes like that after some time…
Airspeed sensor is 4525DO based, from Drotek.
ARSPD_OFFSET = 24,72696
ARSPD_RATIO = 3,602418
(obtained thru ARSPD autocalibration)
EDIT: done a flight with airspeed disabled and problem’s gone (of course, loosing all airspeed benefits)
i’m posting the airspeed vs GPS graph since entire log is quite big… if someone wants to see it, i will upload in a shared place!
Your airspeed ratio seems out of order as its normal max is probably 3. Did you check for leaks or the battery accidentally pressing on the tubing?
actually tubing is very short, next to pitot, alongside wing, then it’s wired to flight controller. I will double check that, anyway.
However, if airspeed ratio value is out of order, it shouldn’t work since beginning of flight, rather than screwing in the middle of it, isn’t it?
Hi Steve,
Log files from both flights would be nice. I’m sure it’s not a software bug, but a problem with the pitot tube or its mounting. As I said, logfiles would be useful to track down the cause. Also a photo of the pitot tube mounting location.
It is noticeable that you needed a high ratio to adjust the sensor. One possibility would be that you already flew with a partially constricted pitot sensor and during the first flight the grain of sand, or whatever it was, “slid” further and rattled there. Therefore the speed measurement was suddenly much higher than it was in reality.
I had several times problems with partially closed pitot tubes
Rolf
yes please, zip the log and put it somewhere we can download
@tridge While doing airspeed autocal, in loiter mode the whole time, the ratio changed to 2.13, and then changed to 4.0. I’m using the common 4525 digital air speed sensor. I’m pretty sure it is set up correctly. I was blowing on the sensor and watching the values go up. I wanted to look at the logs to see what was going on and all of the airspeed values are still flat/unchanging. What else I can look at to see how closely the airspeed was matching GPS speed with the different ratios? I had arspd_use set to zero the whole time, but I still should be able to see some kind of relevant log data.
https://s3.amazonaws.com/realsentrygun.com/uploads/2021-09-03+16-26-16.bin
https://s3.amazonaws.com/realsentrygun.com/uploads/2021-09-03+16-18-24.tlog
it doesn’t look like it found the sensor at all. What I2C pins on the MatekH743 did you attach it to? I wonder if ARSPD_BUS was incorrect. I can’t explain why you saw data in preflight tests.
Do you have the tlog?
hi. FC pixracer. Try beta6 clean fw on new aircraft. Insert clean SD and receive “bad logging” while arming. Found next:
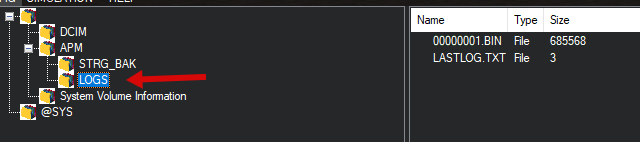
Beta6 fw not creating LOGS directory. I found this because i open MAVFTP->APM and i not see LOGS directory on beta6 fw. After downgrading to stable 4.0.9 this directory (LOGS) appears, and logging started. After this i again upgrade to 4.1 beta6 and logging working. So problem was in LOGS dir. FW beta6 not create it.
2 Likes
I added a link to the tlog.
The sensor was attached to 4v5, CL1, DA1, & G. I tested it by blowing on it and watching the airspeed values increase in mission planner. I also noticed that the ratio values changed to 2.13 and then 4.0 during auto calibration, during flight.
I don’t have that problem FW 4.1.0 beta3 MATEK743 WING
Maybe this error is related to a specific flight controller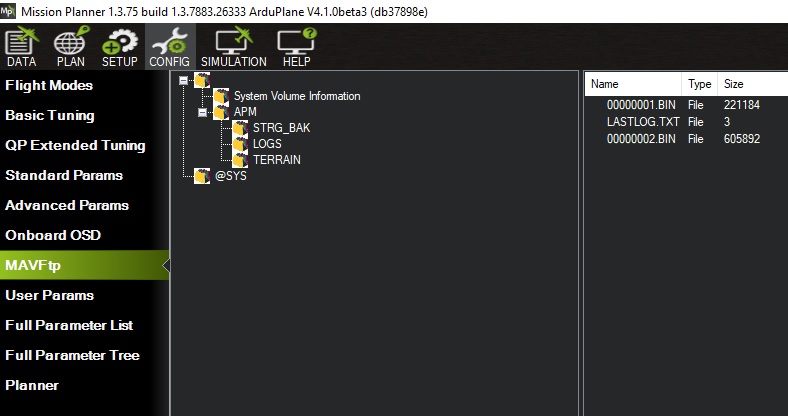
very odd - the sensor is clearly there in the tlog, but gone once logging starts when you arm.
that is just a reaction to the zero airspeed. A ratio of 4.0 is the max allowed
1 Like
I’m wondering what input data it was using to arrive at the ratio of 2.13, during flight, and why that data is not available in the log. I remember the default initial ratio was something like 1.98.
My conclusion so far is just that this AirSpeed sensor is bad. I have another one coming in the mail.
maybe this pixracer problem. But may be useful for anyone. I spent two evenings to catch problem
My board seems to be underreporting battery voltage by about 1 volt. Beta6, PH4-mini, Holybro PM06 power module.
2 cell 7.8V reports as 6.8V
3 cell 12.5V reports as 11.6V
4 cell 16.5V reports as 15.4V
None of the BATT_* settings appear to have changed in the upgrade:
BATT_AMP_OFFSET,0
BATT_AMP_PERVLT,36.364
BATT_CURR_PIN,1
BATT_MONITOR,4
BATT_VOLT_MULT,18.182
BATT_VOLT_PIN,0
Hi tridge,I have several flight last Sunday ,the firmware of FC
is4.1 beta5,and found some problems,I don’t know if this is some logical issue,hope you can check my flight log.
-
List item:My plane can be disarm when it was taxing,it happens when i make a slowly turn,may be I trigger the rudder disarm because I push rudder stick to left too long for turning ,but what would happen if I use rudder for coordinately turn in the air ,do that have chance to disarm the plane?
-
List item:The estimate airspeed sometimes drop ,and inaccurate。for exampe,the airspeed just about 50km/h,but the GS is much higher than airspeed,there is almost no wind affect.
some times i can see the message in DJI MSP OSD remind that DCM active then the estimate airspeed become inaccurately,I know the estimate airspeed can’t be so accurately as airspeed senser ,but not so big difference as the preversion firmware like 4.0.5.
Please check my fly log for more detail.
https://drive.google.com/drive/folders/17-Ir53PZHOFPzTKuREcjvYpkkCIqwgP_?usp=sharing
PLUS:the wind speed and direction some times lost in DJI OSD,I‘m not sure this is the promblem of MSP OSD or firmware beta 5
I’ve requested access to the log
@tridge Why isn’t CTUN.As used in place of an airspeed sensor, so that TRIM_ARSPD_CM can be used regardless of whether an airspeed sensor is used or not? I’m not sure why it was decided that TRIM_THROTTLE must be used when an airspeed sensor is not available, even though CTUN.As seems to be accurate enough. It seems that relying on CTUN.As (and TRIM_ARSPD_CM) instead of TRIM_THROTTLE would be simpler, and would result in a more precise cruising speed vs an arbitrary TRIM_THROTTLE percentage.
Tridge, guys,
here’s my log: