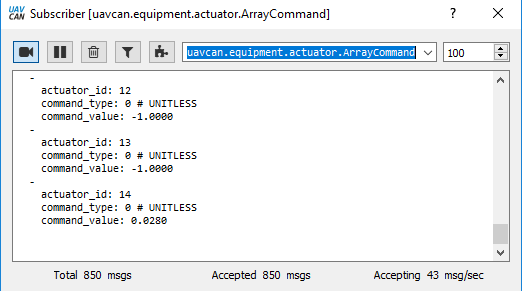
Hello, I am having issues due to an inconsistent UAVCAN ArrayCommand output rate. This is an issue for me because I have a downstream component that implements a timeout, used to trigger a failsafe if ArrayCommand messages from the autopilot are not received.
Firstly, I’d be grateful if someone could tell me whether what I am observing is a bug or indeed a feature. Is the highly variable message rate by design, for example to reduce CAN bus bandwidth? If it is a feature, then I haven’t seen mention of it in the release notes or documentation (please enlighten me if I’ve missed it). Plane 3.9.8 provides a very consistent output rate.
Goal state:
Consistent ArrayCommand output rate of ~50Hz (CAN_D1_UC_SRV_RT)
Configuration/steps to recreate:
Babel (UAVCAN GUI Tool)
CubeBlack
Ardupilot 4.0.0/4.0.2
CAN_D1_PROTOCOL=1
CAN_D1_UC_ESC_BM=0
CAN_D1_UC_NODE=1
CAN_D1_UC_SRV_BM=32767
CAN_D1_UC_SRV_RT=50
CAN_D2_PROTOCOL=0
CAN_P1_BITRATE=1000000
CAN_P1_DRIVER=1
CAN_P2_BITRATE=1000000
CAN_P2_DRIVER=1
CAN_SLCAN_CPORT=0
CAN_SLCAN_SERNUM=-1
CAN_SLCAN_TIMOUT=0
(Full parameter file attached)
Test.parm (29.4 KB)
What I think should happen:
ArrayCommand with 16 channels - 8 CAN frames per message @ 50Hz, I would expect 400fps
Plus NodeStatus, SafetyState etc. so the expected frame rate should be >400fps
What actually happens:
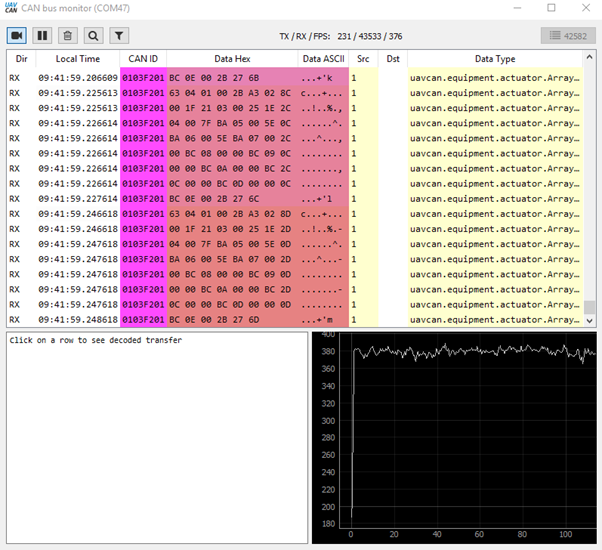
Actual frame rate is ~375Hz(±20Hz) and very inconsistent with a message rate of ~43Hz(±5Hz). Seems to be independent of flight mode and servo activity, so if it is a feature and for efficiency reasons then it doesn’t appear to work particularly well. The most concerning aspect are occasional (every 5~10s) large gaps between messages (>200ms), which corresponds to 10 consecutive not sent messages @ 50Hz. I am confident that there is no frame corruption/loss occurring, rather Ardupilot is not sending the data. I have also tried different output rates, and the actual message rate is 10~15% lower than configured in all cases.
Any support would be greatly appreciated.
Many thanks, Tom.