Has this problem got a fix?

I’m just released 4.0.6beta4. This is a very small update on the previous beta. I expect this to be the last beta.
- fixed an issue with swapping UAVCAN compasses and calibration
- fixed use of VTOL quadplane missions (where the plane flies as a
multi-rotor for auto waypoints) - fixed legacy parsing of some lightware i2c lidars when beyond max
range
Happy flying!
2 Likes
I have a bug with matek f405-wing running arduplane 4.0.5.
If I use only frsky passthrogh telemetry I got solid telemetry link, no sensor lost.
But If I connect a raspberry serial (Open.hd) to FC and use mavlink 2 the frsky smartport telemtry not working (sometime it work for a while and sensor lost)
Attached params.mini talon arduplane.param (24.2 KB)
Arduplane 4.0.5 and tested with Dev 4.10
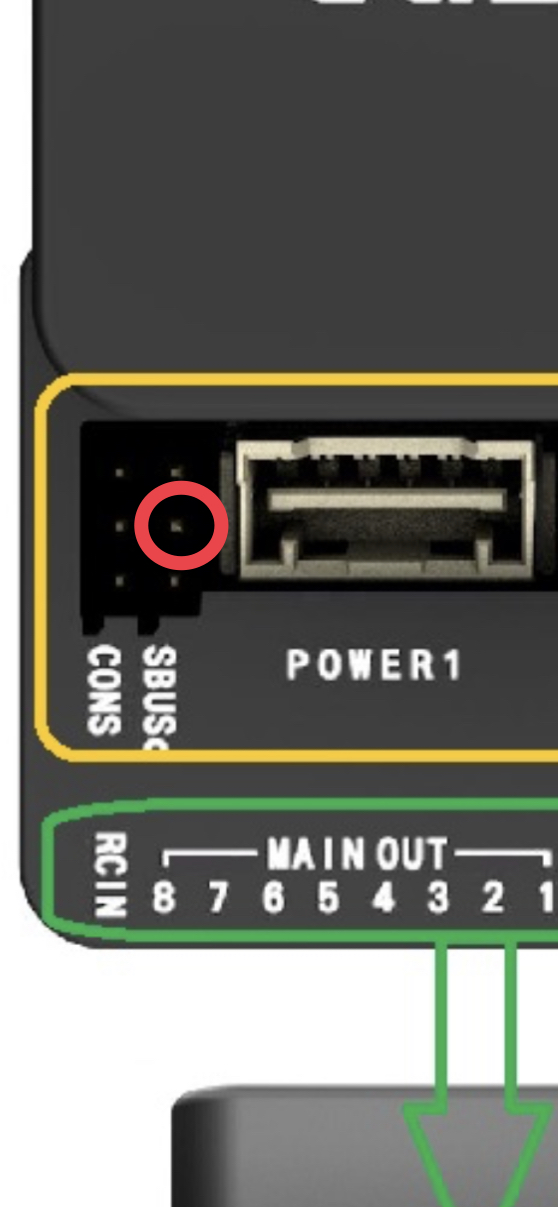
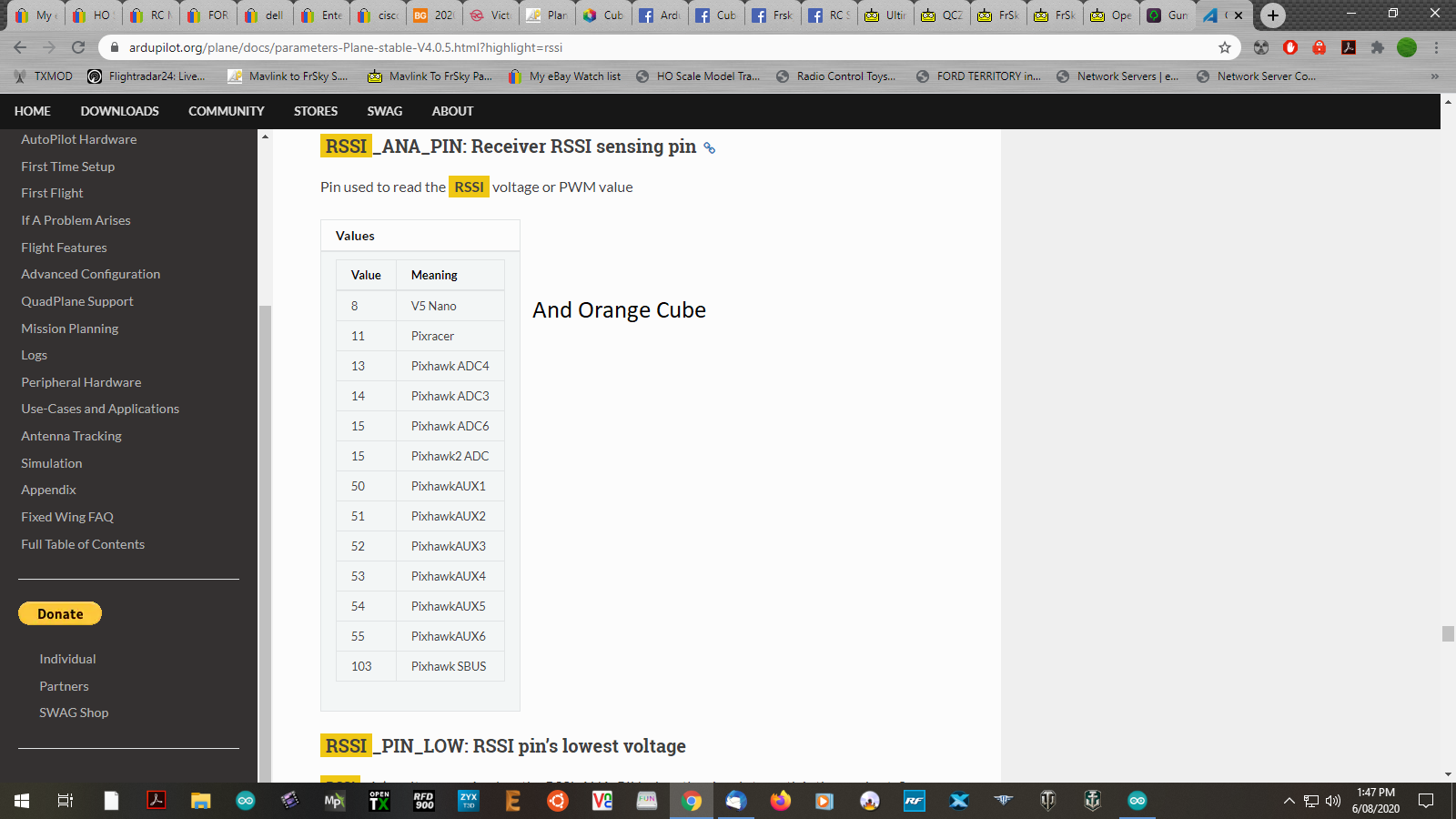
RSSI_ANA_PIN: ADC 15 on an Orange cube not working
i have 4 planes 2 x black cubes and 2 orange cubes
i have used ADC port on all the cubes the 2 black cubes works fine
the 2 orange ones are not working
i have measure volts at the plug to the cubes it ranges from 0 with TX off and TX on high 2.38 to 2.42
any one else come across this ?
1 Like
Question on an orange cube is serial 3 / GPS port one. is this the only serial port that can invert TX and RX pins for frsky passthru protocol 10 ? SERIAL_OPTIONS:7
RSSI in on Orange is exactly the same as RSSI in for Black.
Same with every other analog pin.
RSSI is on the I/O chip not the FMU.
I assume an error has crept in due to the boards with No IO chip having a different pin configuration.

Thank for your time Philip have good night
Will get fix tomorrow and report back time this old man to rest his head lol

Hi Tridge, I am running Arduplane 4.0.5 with the Orange Cube. Do we have an update on the maximum number of waypoints, has this number increased from 656 for this cube? Thanks Kyle
fyi there are also two new utilities available that accompany the 4.0 releases:
Terrain Generator : https://terrain.ardupilot.org with precompiled lat/log tiles and even entire continent packages at https://terrain.ardupilot.org/data. Note: if you connect to MP it will automatically update the tiles for any loaded mission with the new firmware. If you want RTL,etc. protection using Terrain Following on normal flights, replace any old terrain files with new ones from above. The format of the old ones will not be used by the new firmware.
and a very easy to use log analyzer and flight playback visualizer at https://plot.ardupilot.org wiki page here: https://ardupilot.org/plane/docs/com…logviewer.html
1 Like
I’ve tried this feature with 4.0.6beta2 and works fine! thank you!
Hi Henry,
The new log analyzer is really awesome. It is a very nice add on to the existing log tools and best of all it rans as browser plugin on any platform.
Big thumps up!!!

Everybody is good!
@tridge
I saw that PA7 is the temperature control function in the manual of FMU V5, but I did not find the temperature control parameter in the ground station software.

@tridge, please see the following post for details of a near fly-away with RTK FIX… https://github.com/ArduPilot/ardupilot/issues/14789#issuecomment-676492869

I’ve just released plane 4.0.6beta5. This fixes a number of issues found in beta4, and I hope this will be the final beta release for 4.0.6.
The changes from 4.0.6beta4 are:
- fixed disable of throttle nudge during a RC failsafe
- added support for a wider range of DLVR airspeed sensors
- fixed RC input processing for out of range RC channels
- added THR_FAILSAFE=2 option for flying BVLOS with only GCS failsafes enabled
- fixed reordering of compasses on boot based on compass priorities
- fixed use of minimum accuracy for GPS data in EKF2 and EKF3, fixing an issue with RTK GPS modules that report overly optimistic accuracy values
- fixed handling of RC_OPTION bit for disabling receiver failsafe handling
- fixed LOITER_TO_ALT with terrain altitude target
Many thanks to the users who have provided logs and testing for these issues, much appreciated!
Happy flying!
Hello gentlemen,
have flown ArduPlane V4.0.6beta5 (68d41fa6) on omnibusf4pro last weekend in a small flying wing… No issues.
Have also tried a back port of pull request #14542 on top of V4.0.6beta5 . Works as expected. Great work. Keep going!!!
4 flights (1 time quadplane, 3 times planes) went perfectly. Thanks for the further development.