This is a minor release to fix a single important bug in speed/height handling. The bug was in the TECS (total energy control system) and could cause a sustained pitch down due to a transient glitch in airspeed demand resulting in a large negative pitch integrator.
The log that found the bug was of a quadplane in CRUISE mode, and resulted in the aircraft forcing nose down for long enough to crash.
The fix includes both protections for the pitch integrator and a fix for the cause of the transient in airspeed demand affecting the TECS demanded airspeed.
Many thanks to ArduPilot partner FoxtechFPV for reporting this bug!
Some extra notes:
the bug affected both normal planes and quadplanes
the bug was rare. We only have one sample log showing it happening
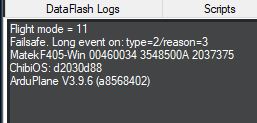
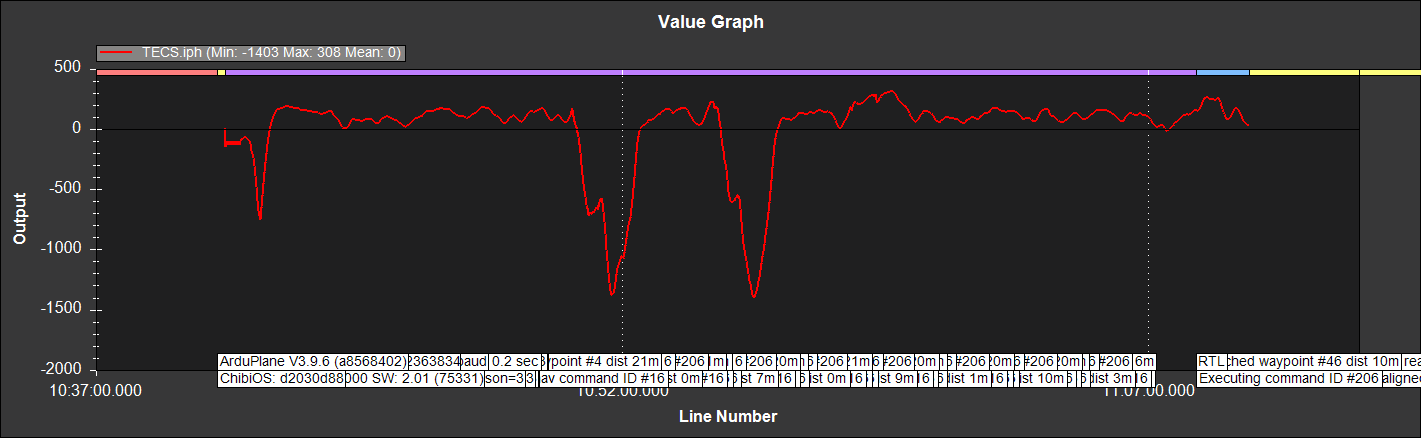
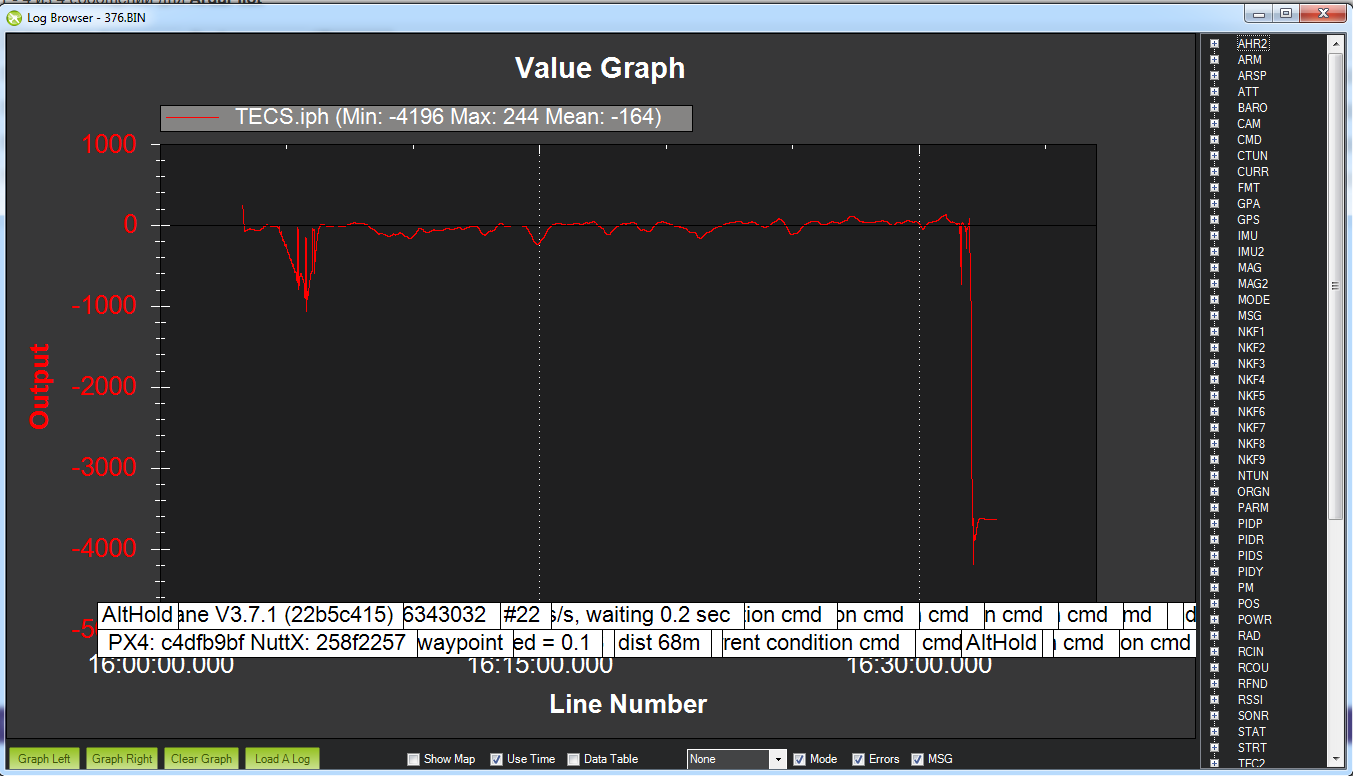
if you suspect you may have been bitten by the bug then look at the TECS.iph value in the log. The distinctive feature is that TECS.iph suddenly drops to a very low value while flying
Hello Tridge, thanks for fixing the bug
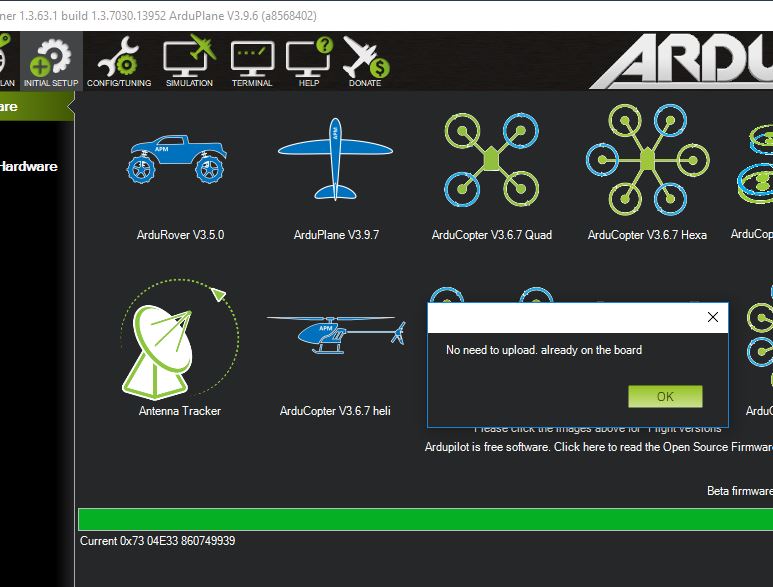
But I just wanted to update, the MP reports at 3.9.7 (installed is 3.9.6) “no need to update”? FC is a F405 Wing
Update:
I just built a plane with a Matek F405-STD board, but can’t find the 3.9.7 firmware for this board. The note in the Wiki documentation suggests using MATEKF405-STD firmware.
@Jan_Willem dedicated MatekF405 STD firmware versions have been added to master, but not to plane 3.9.7 release version yet. while the existing MatekF405 type firmware supports a variety of respective board variants, you‘ll likely have to check / adjust AHRS_ORIENTATION on STD board version with ICM20602, as opposed to older board types with MPU6000.
can you give a link to the log?
The graph you showed doesn’t look like the bug, as it shows a steady change. The bug happens when iph changes suddenly (in a single time step)
tested on omnibusf4pro, matekf405wing and fmuv3, all working as expected.
noticed full external baro support hasn‘t made it into this release (again). i like this feature a lot and have been regularly using it on master with excellent results. imho it‘d be great to have it added to release versions.