This is the fourth in a series of beta releases for plane 3.9.0. It is a major release, with a lot of changes.
fixed compass detection on pixracer
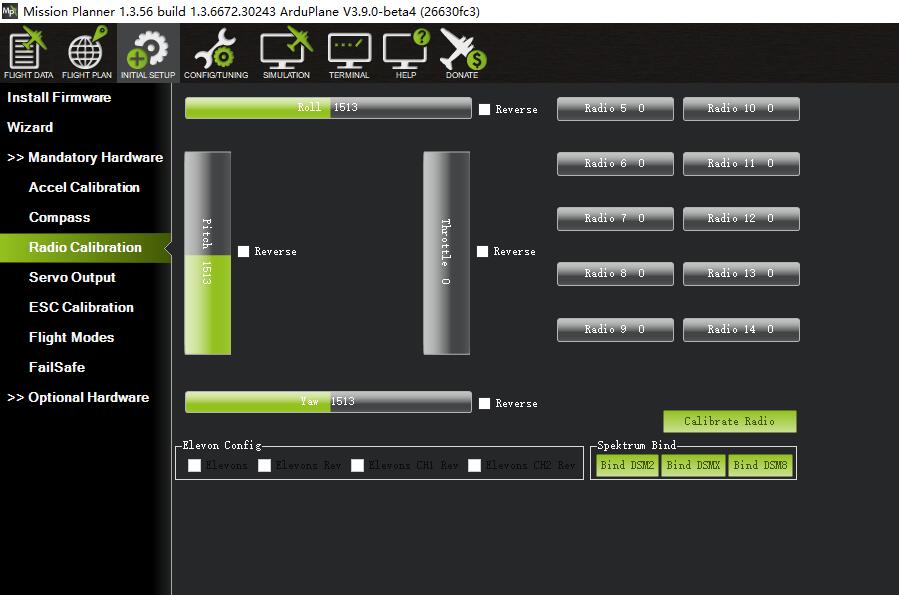
greatly improved OSD support
fixed ARMING_REQUIRE=2 support (thanks Marco!)
added automatic compass orientation support
added probe for all external compasses on new ChibiOS boards
fixed arming with compass disabled
fixed flow control on F7 based boards
fixed prealloc of DMA bouncebuffers
added board specific builds for mRoX21 and Pixracer
fixed mRoX21 IMU detection
Many thanks to all who contributed to this release, and our beta testers! Special thanks for this release to:
Marco for spotting the ARMING_REQUIRE=2 bug
sh83 and @vierfuffzig for lots of new OSD features
@priseborough for help with the new compass auto-orientation code
everyone in the ArduPilot ChibiOS gitter channel for awesome feedback and flight testing
For this beta, I would especially appreciate testing of the new compass auto-orientation code. To test it you can set COMPASS_AUTO_ROT=2 and then do a compass calibration. If your compass orientation is wrong it should automatically fix it. If you leave COMPASS_AUTO_ROT=1 (the default) then it will fail the calibration if the orientation is wrong, but won’t fix it. It will only ever fix the orientation of external compasses. For internal compasses it will check they are right, but not fix it for you.
I hope this is close to the final 3.9.0 release, but we rely on your feedback. Please test!
congrats, that’s a lot of effort summed up in this release! thank you @tridge and @sh83 for welcoming people like me with hardly any previous knowledge with arms wide open and putting them in the place to contribute, achieve and experience your team’s fabulous spirit. this is an exceptionally rewarding experience.
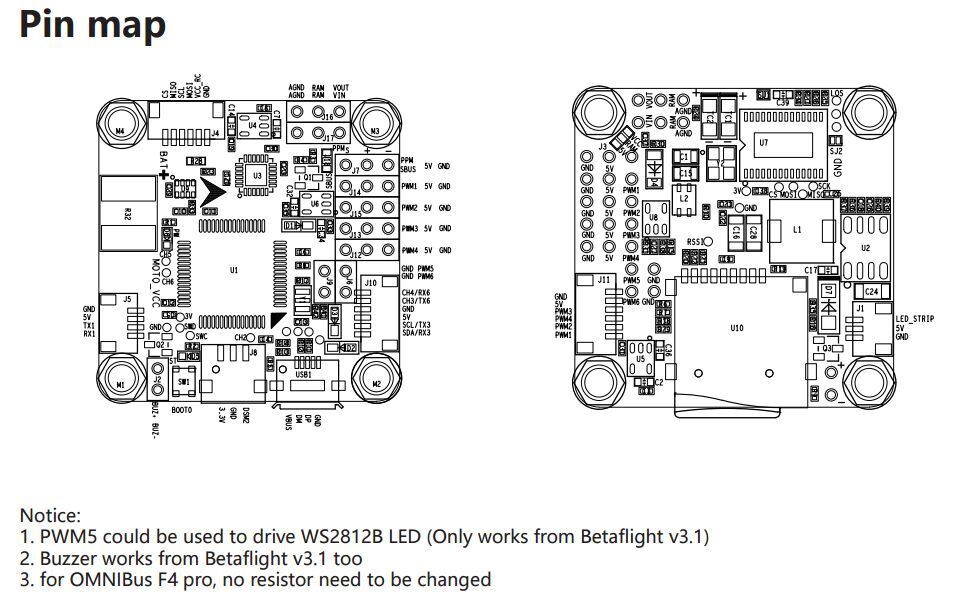
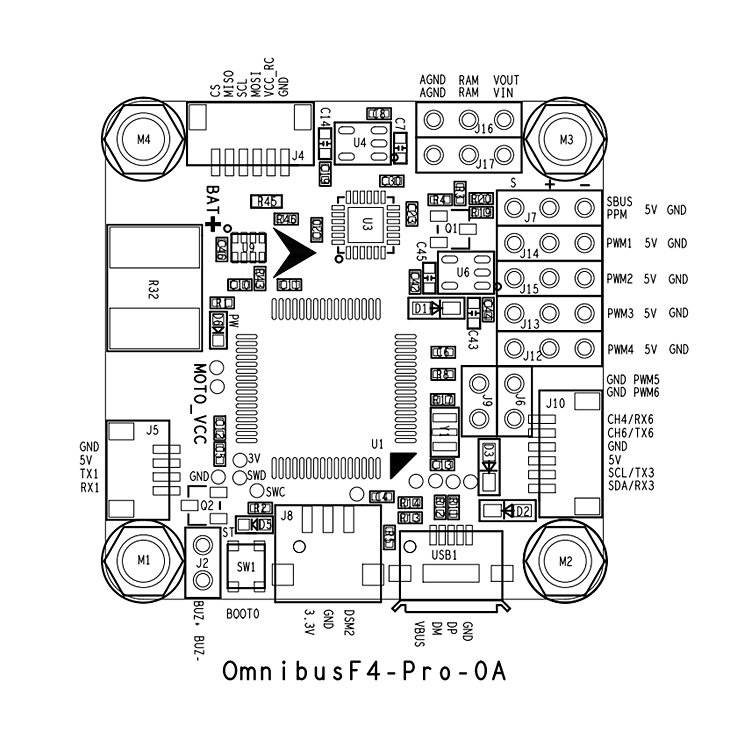
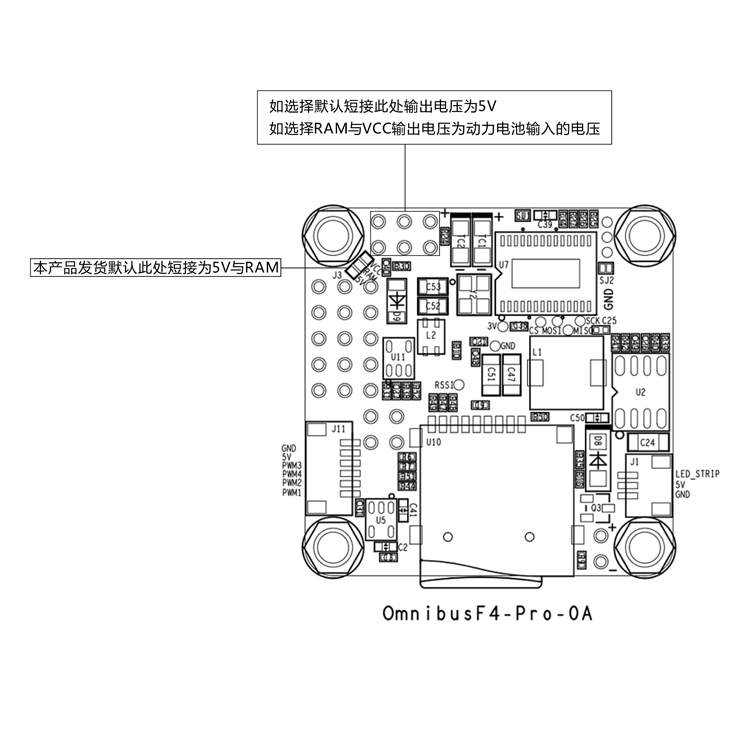
Can’t tell from photo, but is the 3 pad input selector bridged to Sbus or other pad? Not sure if that would cause no signal to board. On my f4prov3 I bridged to other pad, due to Uart6 matter.
Quadplane (Mini Talon) with 3.9.0beta5 ChiBios on pixhawk 1 today performed second flight with this fimrware. QSTABILIZE, QHOVER, QLOITER, FBWA, AUTOTUNE, MANUAL and AUTO-Track workes perfect. Thanks to Tridge and the other developers.