Hello all,
I am using a Pixracer (recently purchased from Mrobotics) to control my autonomous solar drone boat. See here: http://www.skyviewcustoms.com/champlain-explorer
This boat has been run successfully while using a Mateksys 405CTR. I had some overheating issues with the main processor and figured it might be caused by the built in voltage regulator. This is why I switched to the Pixracer (plus more redundant sensors).
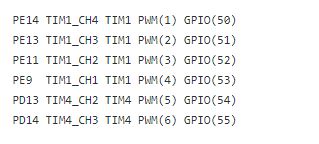
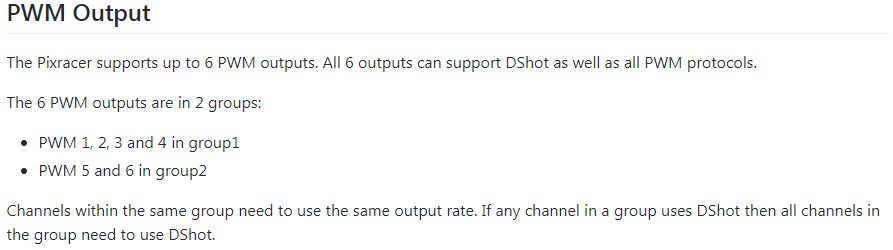
I have used Dshot with esc telemetry successfully with the 405CTR board but have extreme servo jitter with Dshot enabled with the Pixracer. I even have jitter before arming. If I set up the MOT_PWM_TYPE to “normal” the jittering goes away and the servo works as intended. I’ve also tried setting the BLH_SERVO_MASK parameter to just the Servo 3 output (motor) but still have issues. Is Dshot being pushed to the servo channel as well?
The servo is powered from a separate voltage regulator so just the ground and signal wires are connected to the servo 1 port on the Pixracer.
Specs:
- 1 X rudder (Servo 1)
- 1 X motor/esc drive (Servo 3)
- ESC is blHeli32
- Ardurover 3.5.0
Please see attached pics/log file.
Any help fixing this would be appreciated
Ryan
https://drive.google.com/drive/folders/1dn-CvGkMPs6QK7_8M8qGz7YwCffbHaWa?usp=sharing