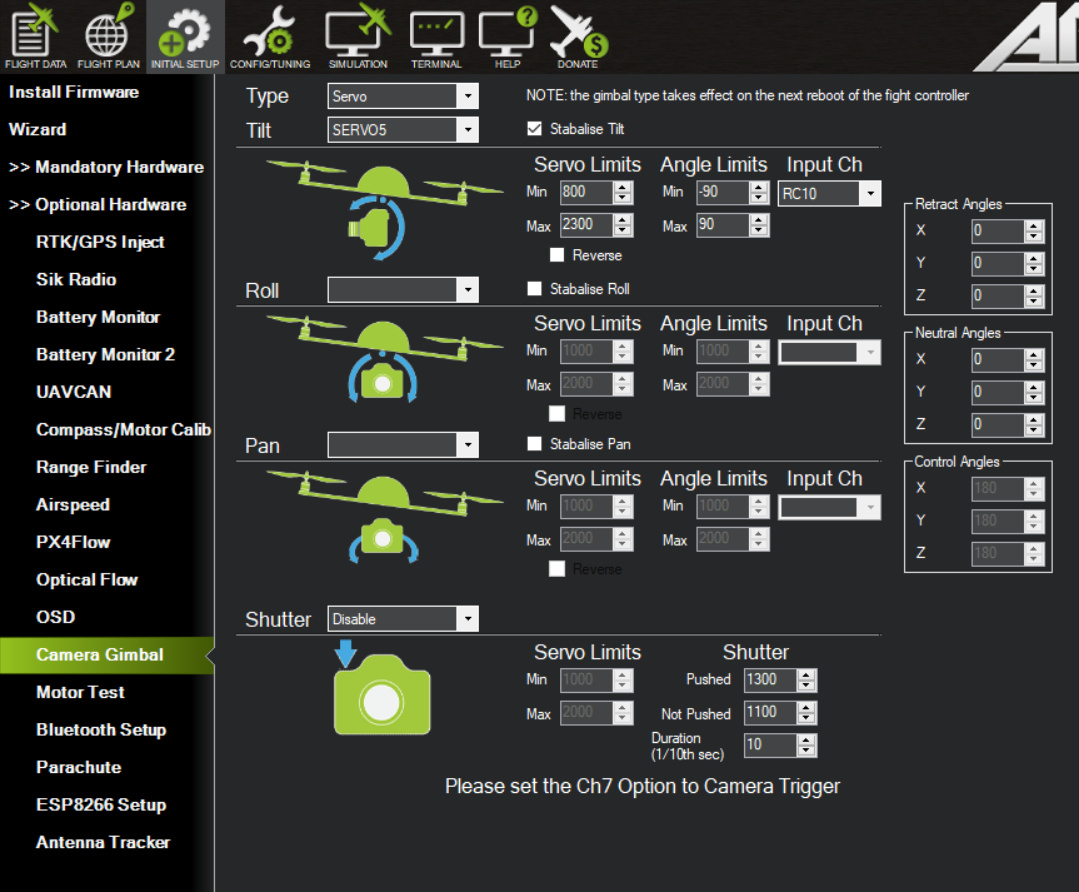
I am trying to connect a pitch stabilized analog servo gimbal to a Pixracer AC 3.5.4 quad using the internal camera stabilization. I connected the servo to ch6 on the Pixracer, provided power from an external BEC, and configured:
MNT_TYPE = 1
MNT_STAB_TILT = 1
RELAY_PIN = -1
SERVO6_FUNCTION = 7
MNT_DEFLT_MODE = 1
BRD_PWM_COUNT = 4/6
For the tests on the desk I set:
ARMING_CHECK = 0
BRD_SAVETYENABLE = 0
I am not sure about the SERVO number and the BRD_PWM_COUNT. I tried several settings but without luck - the servo is not moving.What am I missing?
The next thing I need - in combination - is CAM_TRIGG_TYPE = 1 (Relay), which is working but I am wondering if it is possible with the Pixracer in combination with a servo to stabilize the gimbal.
Any help is greatly appreciated!
Thanks in advance,
Thorsten
I don’t use both servo stabilization and relay trigger at the moment, but I remember I did a test to see if it possible to use it all together. And I was able to do that.
Hi Sergey,
thanks a lot for your reply. It confirms that am on the right track.
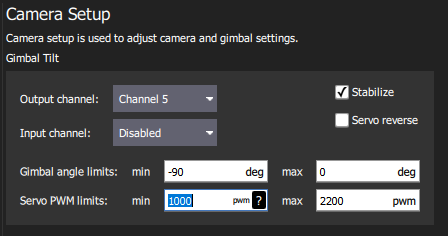
So I played a bit more and can confrim that the servo is working. When checking/unchecking “Servo reverse” with the following settings, it truns 90°. But there is no response to any board movement. So I am wondering if there are any other prerequisites required before the stabilizing process starts?
Your settings looks good.
One thing I know from own expiriense is stabilization does not work if I enabled my copter without RC control beeing enabled first.
In such case copter just like hangs on half way while boot-up. After I enable RC then FC board boot up completes and stabilization works.