I put this under Copter 4.2 but it applies equally well to Plane 4.2. Pixracer with ESP-01 works with legacy firmware V3.9.8, V4,0.1, and V4.0.2. Using current Plane (V4.2.1) or Copter firmware disables the ESP-1 form communicating with the flight controller.
Connecting with what?
The ESP-01 internet of things WiFi telemetry radio plugged into the top of a Pixracer flight controller does not “connect” with ground control if the Pixracer is operating on Arducopter 4.2.x or Arduplane 4.2.x but does connect if the Pixracer is operating on legacy firmware V3.9.8, V4.0.1, o V4.0.2. The version of Mission Planner or QGroundControl does not seem to make any difference.
I see you are using the Beta version of Mission Planner. I will try that tomorrow. Do you know which version of ESP-01 you are using?
It’s been working on every version. Version of firmware or the module? I have several models with these on Pixracers and other FC’s and they have been working for years.
I use these cheap ESP-01’s

And the firmware from here:
ESP-01
Hi Dave . We have thousands of them on aircraft all over the world . nearly all stopped working during the past two weeks, so we are trying to sort out the root cause . We did not change firmware on the ESP-01s . we did upgrade Mission Planner, but not yet to the beta version you are using, and we did upgrade the Ardupilot (plane and copter) firmware. We ran a set of tests this afternoon where we tested legacy arduplane and arducopter firmware, and they worked fine with the legacy firmware but failed after installing current firmware. The reason I asked about the version is that there are two: ESP-01 and ESP-01S.
So the Copter connected fine but oddly the Rover does not. Not to Mission Planner, QGC on IOS and I can’t browse to the web interface even though it connects to the Access Point. They are both PixRacers and I don’t immediately see why this is…
Welcome to the mysterious “ESP-01 Not Connecting” Unfortunately the error message is not very revealing.
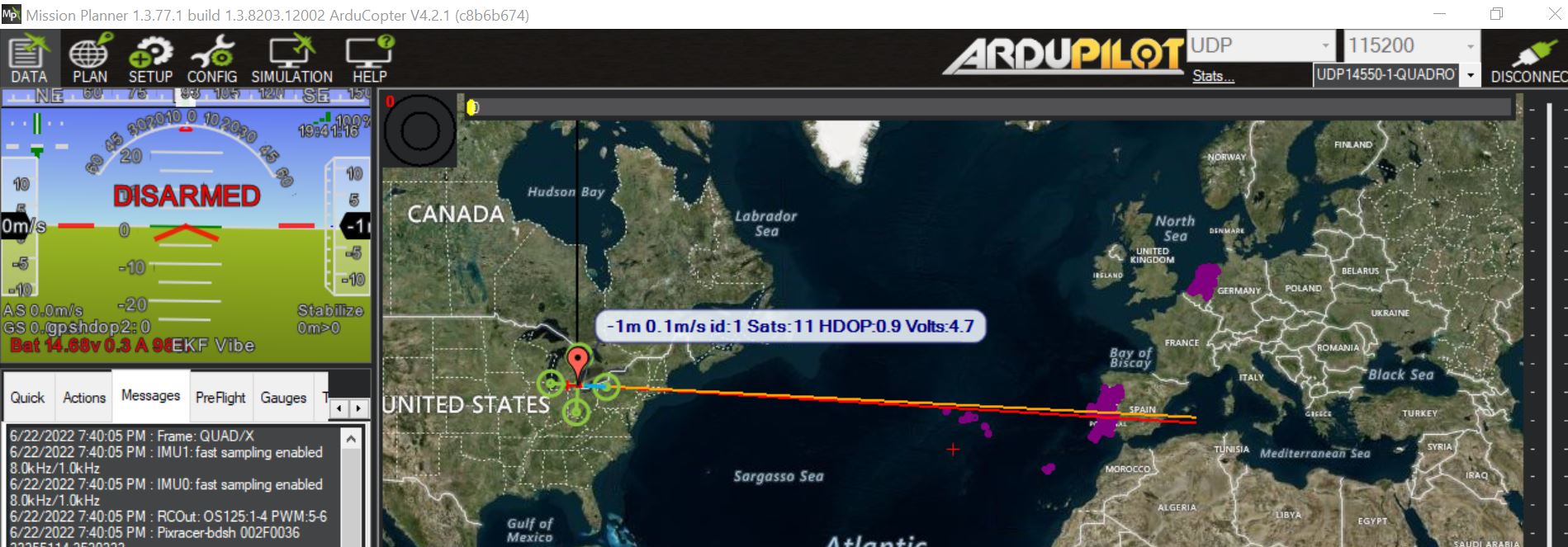
The ESP-01 internet of things WiFi telemetry radio plugged into the top of a Pixracer flight controller does not “connect” with ground control if the Pixracer is operating on Arducopter 4.2.2 or Arduplane 4.2.2 but does connect if the Pixracer is operating on legacy firmware V3.9.8, V4.0.1, V4.0.2, 4.0.3, 4.0.4, or 4.0.5. Connecting to V4.2.2 disables the connection. Returning to 4.0.5 enables the connection. Returning to V4.2.2 disables the connection. We tested this repeatedly using Mission Planner 1.3.75 and Mission Planner 1.3.77.1. We also tested with V4.2.2 bdshot, leading us to conclude something is amiss with V4.2.2. I am including a screenshot of the error.

are your radios mavlink 2 compatible? if not you will need to manually set the SERIALx_PROTOCOL to 1 for mavlink 1, before 4.2 the flight controller would revert to mavlink 1 if no mavlink 2 was detected.
I faced similar issue with mavlink connection via WiFi ESP after upgrade to 4.2.x on pixracer. For me worked change of parameter SERIAL5_PROTOCOL to Mavlink1. Then reboot.
Serial5 is a port for WiFi connection via ESP module. Hope it helps.
Hi
I have a pixracer R15 with copter 4.2.2-rc1. I have no issue running ESP-01 neither with Mavlink 1 nor 2.
BR
Harald
I see no problem with Copter 4.2.2-rc1 on a PixRacer with mavlink 2 either but Rover with the same version level won’t connect with Mavlink 2 . It does with Mavlink 1 as @jtkacz says.
I think we have the issue well understood. If your ESP-01 has Mavlink-2 compatible firmware, it will work with any of the V4.22 ardupilot firmware. If your ESP-01 has Mavlink-1 only compatible firmware, it will work only until the new ardupilot firmware changes default to Mavlink-2. Then you have to either update the firmware on your ESP-01 or set a parameter to enable Mavlink-1 on the relevant port.