Putting together my PixRacer/Trad. Heli project. After plugging 3 cyclics and the Rudder servos into PWM Pin Outs 1 thru 4, I’m asking:
Is it better to use the Pin Out labeled 5 or Pin Out Labeled 6 for the ESC?
How/Where do I set the parameters to direct the system to look for the ESC on whichever Pin Out I select (Pin out 5 or Pin out 6)? With a full sized controller, I believe it defaults to the Pin Outs at position 8.
Is there an good reference for the peculiarities/adjustments needed to set up the PixRacer over a normal flight controller with 8 PWM outputs? Additional info:
Throttle being received on CH 3 per Q Ground Control
Using Spektrum SPM 4648 Receiver on mRo R15 PixRacer w/ ArduCopter 4.0.3
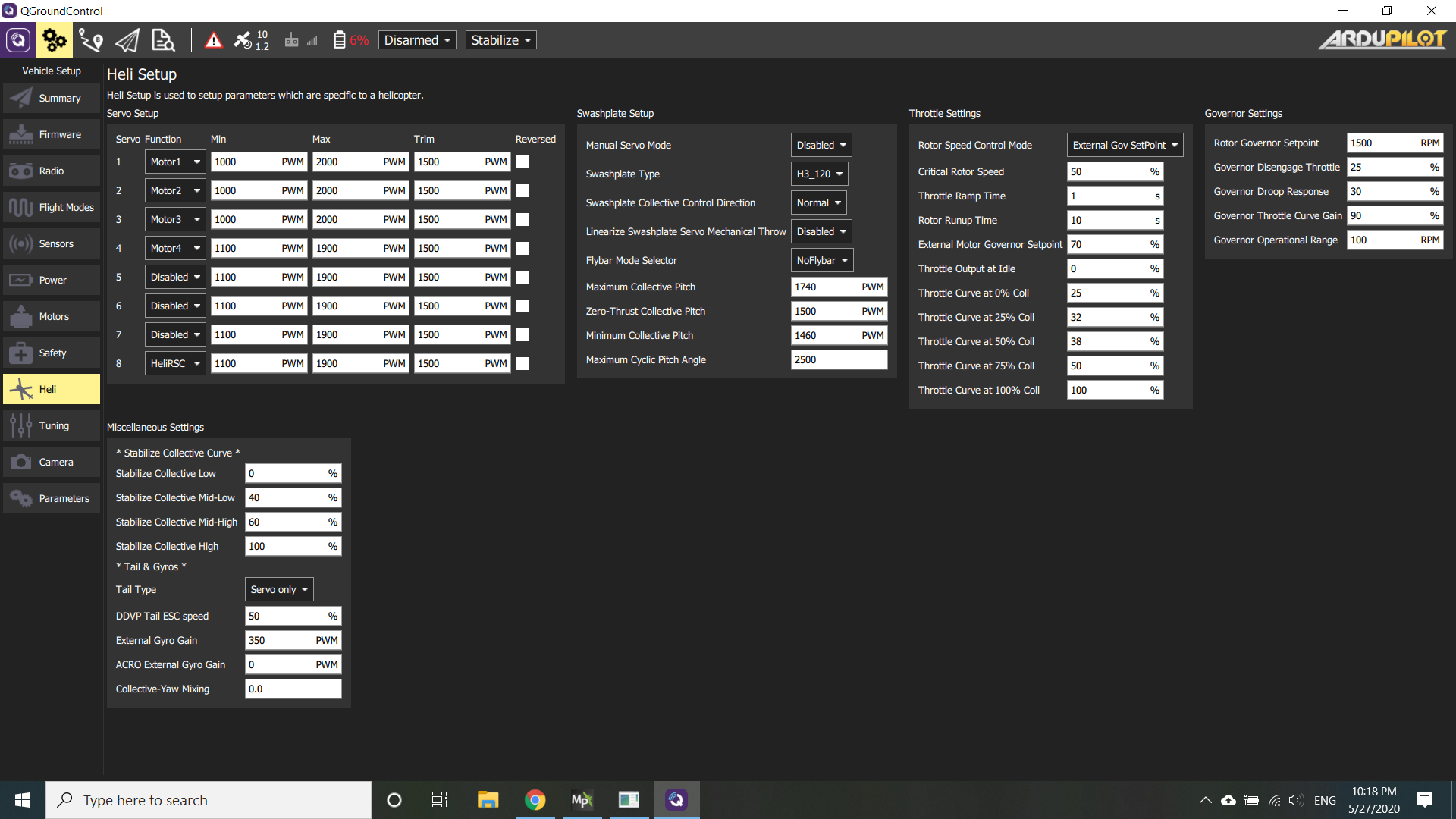
Use the pull down for the function box and change Servo 6 function to RSCHeli and Servo 8 function to Disabled. After that remove power from the controller and then power it again and let it boot. Go back to the heli setup page and ensure that the settings remain the same as you set them.
Yes your throttle stick on the transmitter which is channel 3 out will be received and be inputted to the controller as RC channel 3. This is no different from the normal setup. Just be sure that the Motor Interlock is set on the RC transmitter to a channel with a switch so you can enable and disable motor interlock. This is defaulted to channel 8 on your transmitter. You can change that by changing the RCX_option parameter for the channel you want to use and disabling it on channel 8.
Thank you both Bill and Phillip. Being new to this subject, your clear guidance, complete with screenshots is eminently appreciated. Makes me want to collect your responses and build a personal manual on Hints and Tips for working with PixRacer. All the best. Mike