Hi,
I have issue with my new build Quadrocopter - at the end of “time” test - it has crashed.
The Multirotor was in Loiter mode since the begining of the test. While flying the copter was keeping position wery well - even while 360 rotation.
Suddenly (@ 22 min) has crashed.
I was testing my quadrocopter while 13m/s wind (pushing to ground) and “RTL or land” was enabled @ 12.8 V.
While the battery V was 12,5 V the drone starts loosing Alt and received 30 degree list to right - then RTL enabled but it was not able to pick up…
Why does the RTL started @ 12.5 V ?
Which information I need to check in log-s ?
Do You thing that battery V was to low and wind (13m/s - pushing to the ground) was to strong for remaining V to maintain position ?
Could You advice where I can find explanation of all shortscuts which are in log file ? I cannot understand some.
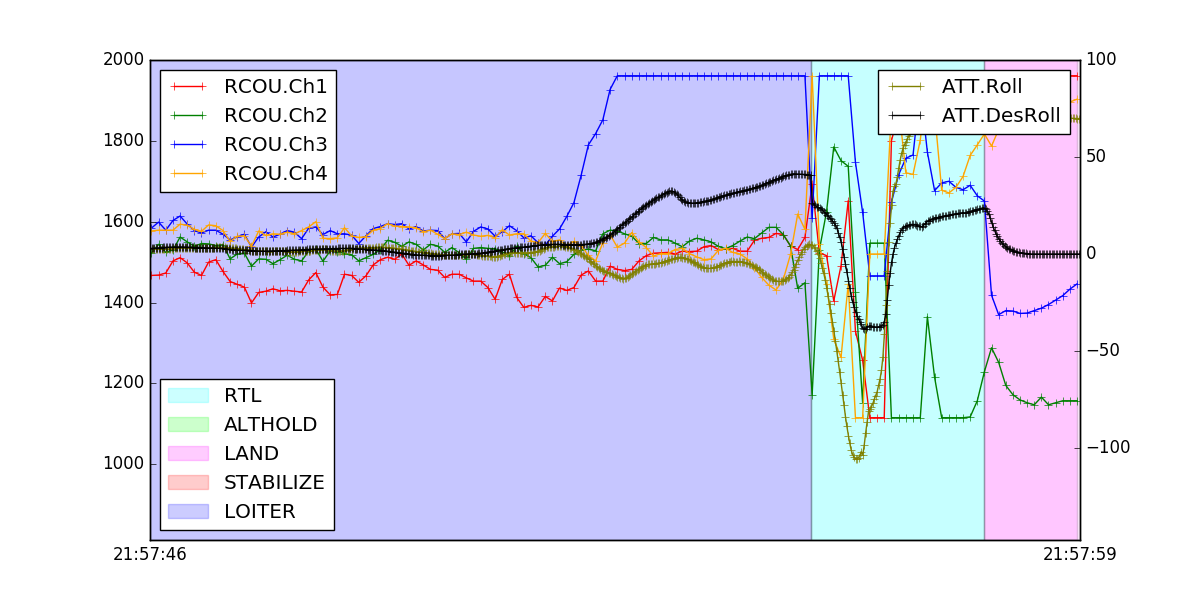
While beeing in Loiter can I check the CH 1,2,3 & 4 output (manual) ? I need to check If I by mistake have lowered the throttle…
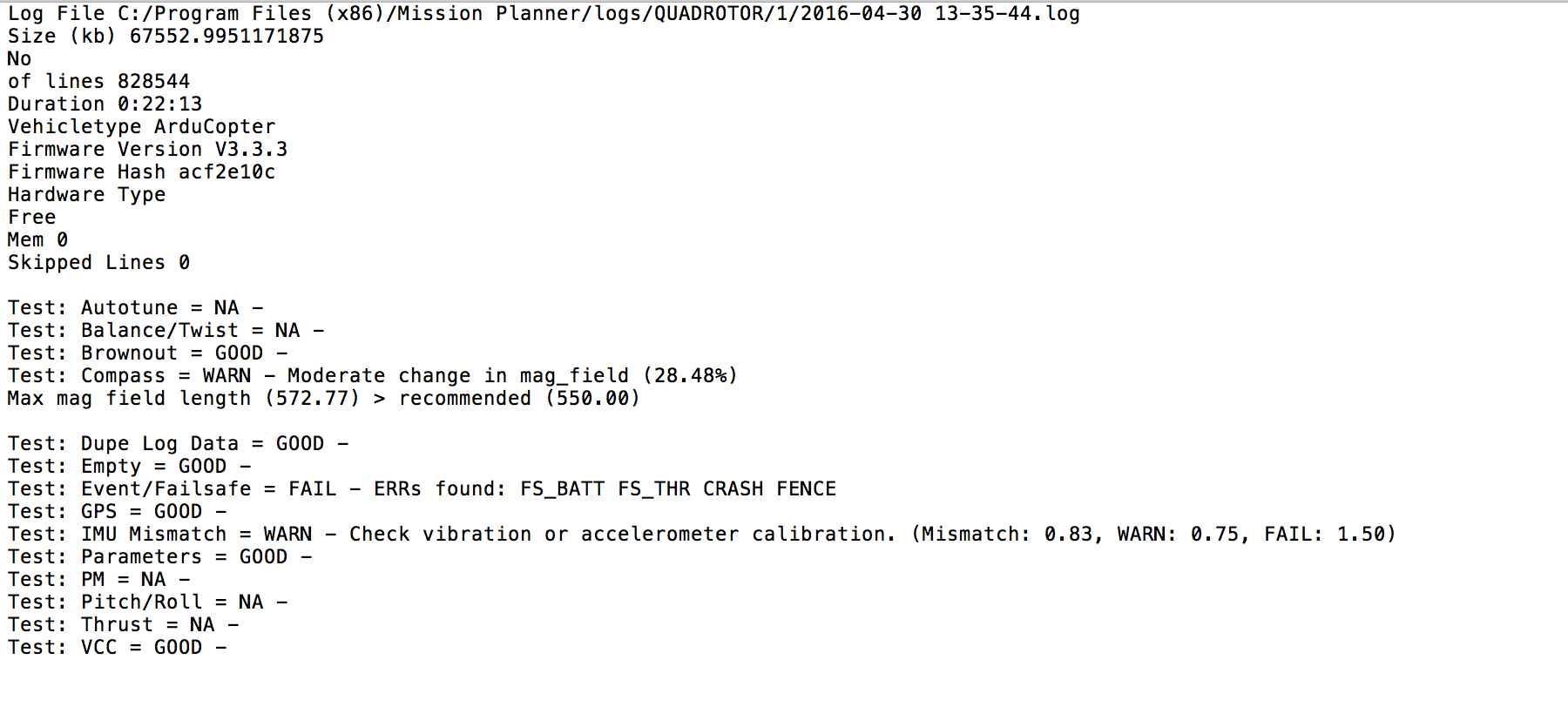
Please find attached log Analysis created by MissionPlanner
Can you upload you log file somewhere else, I cannot download it from that site.
Assuming you are running a 4S battery, then 12.8 is a critically low voltage. Once Lipo’s reach about 3.2 volts per cell they start loosing power VERY fast. As a rule of thumb, set your fail safe voltage to 3.4 volts per cell if you are flying nearby to avoid losing power and damaging your batteries. Set it higher if you are flying far away from your home location as it will take some time to get home.
I suspect that at 12.5V your battery could not supply enough power to fight the wind. BTW, if you really mean 13 m/s then that is VERY VERY high wind for any quadcopter to be operating in. That is nearly 30 miles per hour. I am impressed it stayed in the air for 22 minutes!
Using mission planner you should be able to see when a failsafe was activated using the review log function.
Once you understand mission planner log browser, you can easily view the RCIN C3 (channel 3) parameter if you wish to see if you lowered the throttle.
Also, you obviously have some compass issues, so make sure your compass is mounted far away from other electronics and most importantly power wires from the battery and ESCs. Then redo the compass calibration. Also do the compassmot calibration.
Yes, RCIN, C3 will show what position you had the throttle on the controller
If your compass offset values are less than 125, then the compass is in pretty good shape. The offsets will be reported at the end of a calibration. Only use an external compass, and I recommend disabling the internal compass.
Compass mot will calibrate the compass against the larger magnetic fields generated when you run your motors. If your wiring is good, this won’t make much of a difference but it is still a good idea to do.