My copter had a bad crash today. It was performing a mission in GUIDED mode. It was not the first time. It had carry out different flights in GUIDED mode in the pass without problem. The copter was hovering at a given position and it suddenly went down. It looked like the motors just stopped spinning. I checked the log file with APM 2 and got the following errors:
Subsys=1 ECode=1 (Documentation says, it is never used)
EKF-CHECK: Bad variance
FS-EKF_INAV
I noticed that before these errors happen the current drop down to almost zero. Therefore, I guess the previous errors are a consequence of the crash, but not the cause.
I share the log and really appreciate if someone can help me with a idea about, what was the problem.
I cant give you a reason for the crash but the error codes you refer to happened after the event.
How good is the tune?
Have you autotune it?
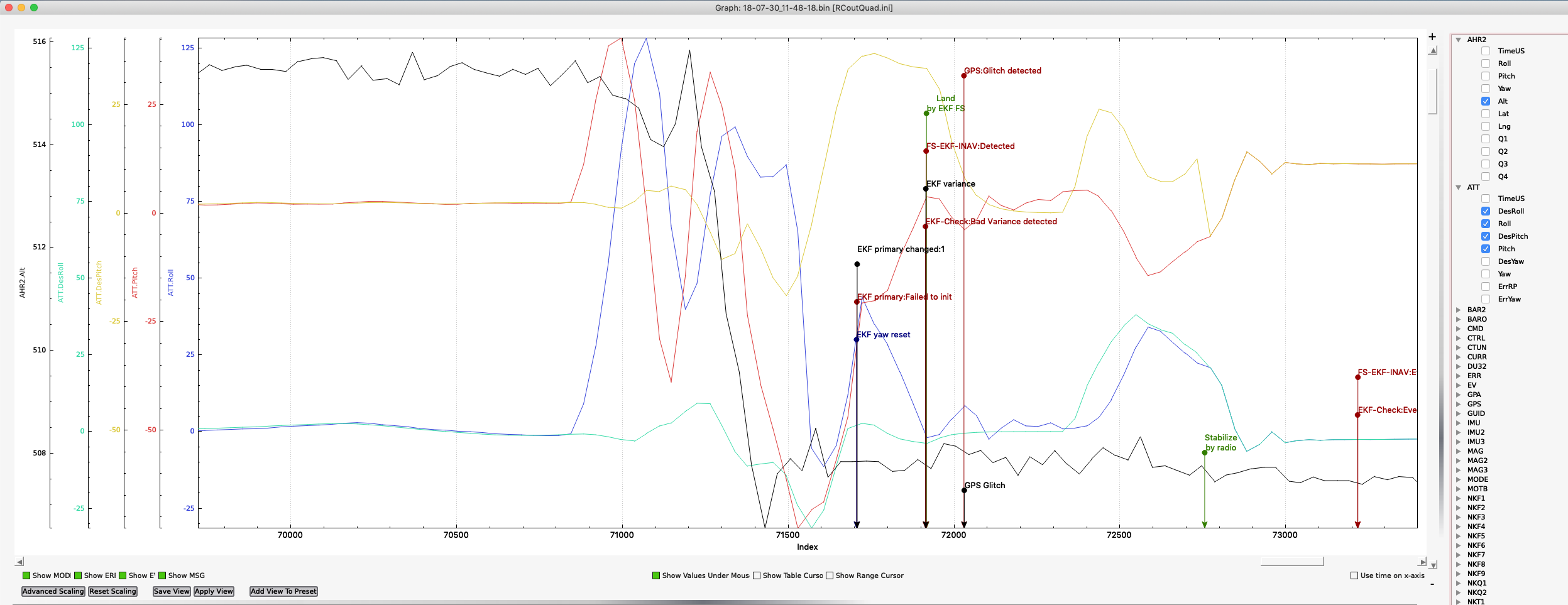
You can see here that all was good then suddenly the Actual roll/pitch deviates from Desired but the flight controller only slightly reacts.
You can see the events you refer to happening on the way down.
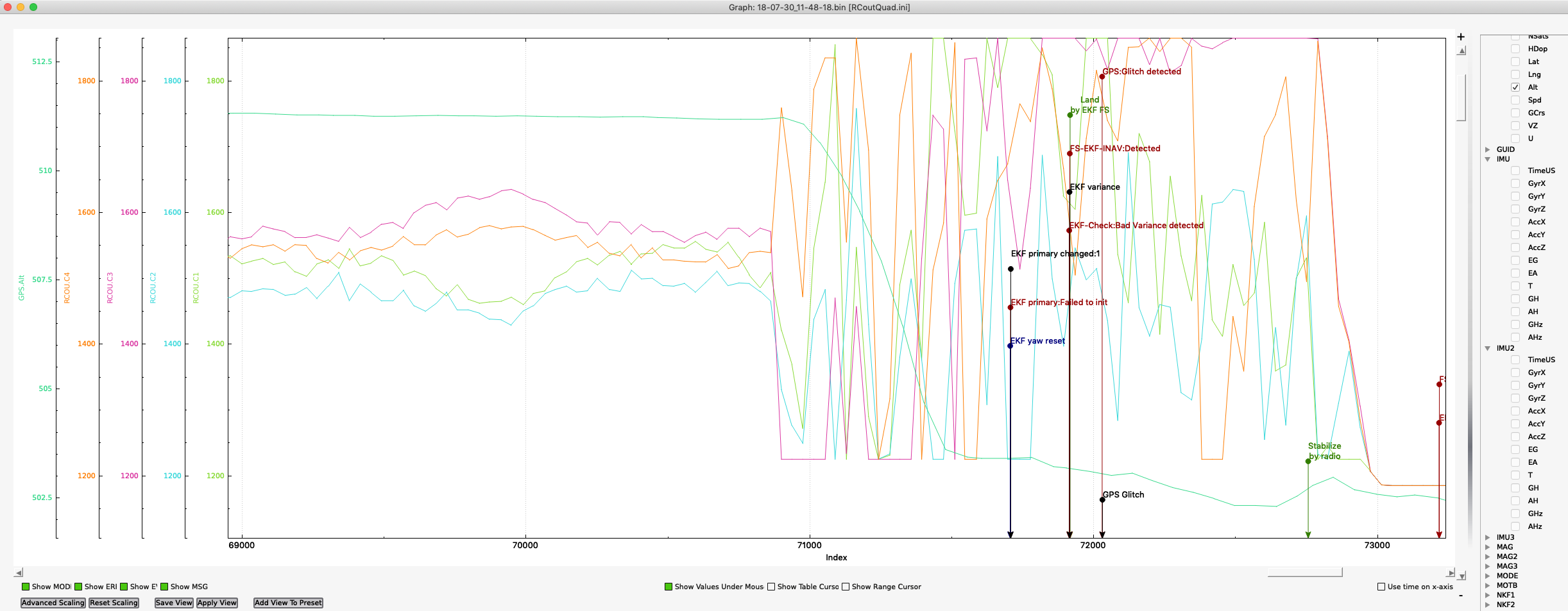
The Rout does react to the disturbance.
What size props are you running?
You have plenty of power but the FC is shutting motors down to try and regain control.
Large props? Have you adjusted the filters?
Thank you very much for your respond.
Yes, I did the autotune and the copter flies usually stable and smooth. However, from time to time it moves strongly in the air (kind of bouncing). I added a video. You can see what I mean in fourth second during the flight in GUIDED mode and in second 19 during the landing. I though, this behavior was due to the wind.
After watching the video I had a thought.
Do you use bullet connectors to the motors?
It looks like an intermittent connection, like a loose Bullet connector.
It is for this reason that I do not use connectors but rather solder the wires.