I’d like to use GPS2 as only GPS for Pixhawk2.1.
However, when I connect my GPS module on GPS2 port and run Mission Planner, it seems not work properly.
I can check gpsstatus2, gpshop2, and satcount2 has some values, but HUD says “No GPS”.
In the status field, I can check lat and lon data - which seems to receive GNSS data in somehow.
How can I solve this problem?
Please help me. Thanks in advance.
Hi friend,
what does it mean: “It only works with master, so make sure you are using that.”?
I’m a problem whit Hacc and Vacc of my Pixhawk 4 whit RTK module on Serial4 port… Hacc and Vacc is calculated only on valors of main GPS (3DR default M8N gps in box whit Pixhawk).
My Arducopter version is 3.6.11 and in my option for GPS_AUTO_SWITCH i only possible valor of 0-1-2 but none of these causes Hacc and Vacc to be calculated based on GPS2 RTK data.
Good news, you no longer need to compile the master branch from github repository to use this.
You just need to update to copter 4.0.0-rc1 version, available from mision Planner.
Then the value of 3 will be possible as well.
hi @amilcarlucas,
i upgraded to AC 4.0.3 but i’m a demand.
If i set GPS_AUTO_SWITCH to 3 i lost possibility, if faulting RTK GPS, of utilise main GPS of Pixhawk…
It is possible to see the real time Hacc and Vacc whithout change GPS_AUTO_SWITCH to 3 (i’m set 1 “Use the best”).
Thank’s for your help
Hi @amilcarlucas
i tested my drone whit GPS_AUTO_SWITCH = 3 but parameters Hacc and Vacc is they are always shown with metric precision and not sub metric.
When I did the test my base station was in TIME mode and correctly sent the data to the rover.
The positioning on the mission planner was evidently influenced by the RTK mode because it was extremely precise (on topography background), which changed for the worse when I stopped the transmission of the RTK data to the rover.
but Vacc and Hacc even if GPS_AUTO_SWITCH = 3 is of metric and non-centimeter order.
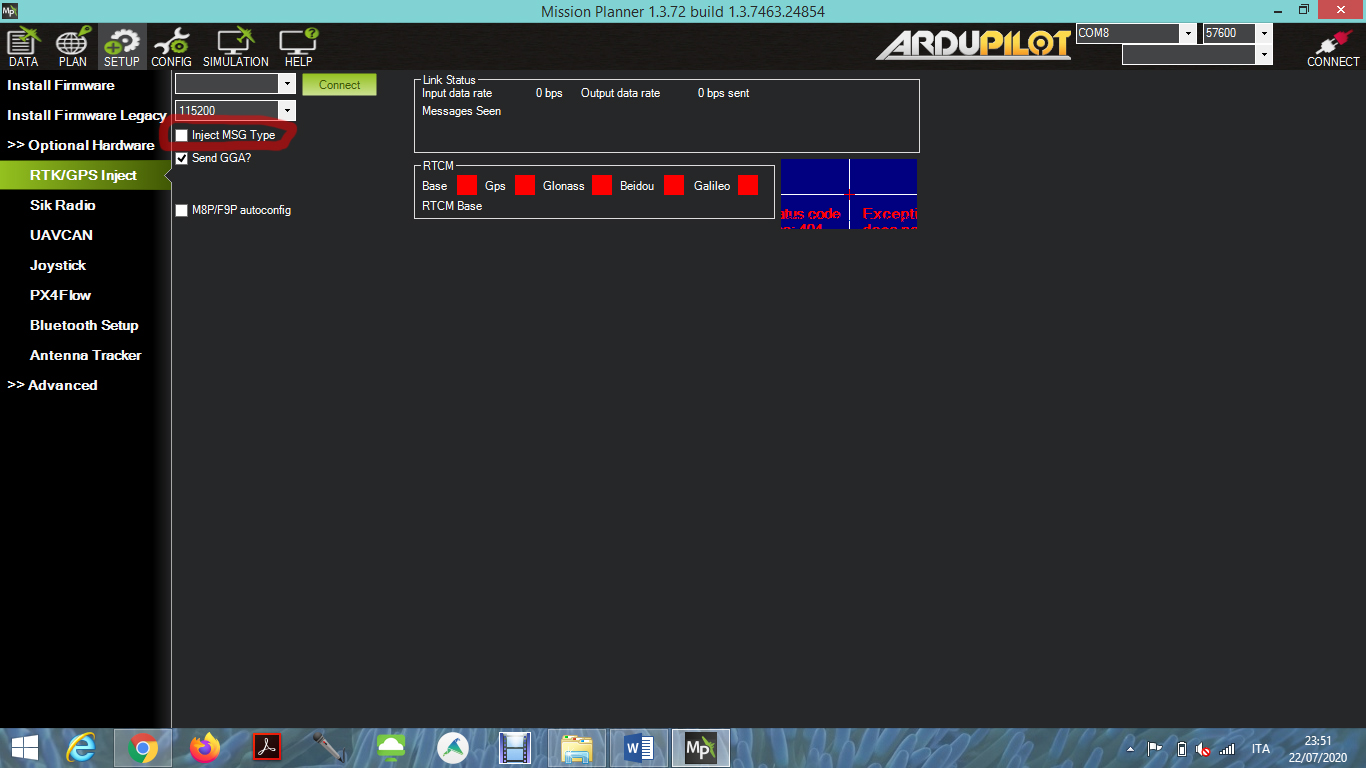
What is the meaning and function of flagging the “Inject MSG type” entry in Mission Planner?
Can you help me please?
Very thank’s
Hi @amilcarlucas, tank’s for your reply.
At this moment I don’t have the drone with me but when I did the test all the RTCM boxes were in green.
What is the function of flagging the voice “Inject MSG type”?
What exactly does it do “Inject MSG type”?
Are you setting GPS_AUTOSWITCH to 3 in QGroundLink->Vehicle Setup->Parameters? I don’t see this parameter listed. I know this post is old but I’m trying to connect a single Holybro H-RTK F9P Rover Lite GNSS to my CubePilot on the ‘GPS 2’ port and I’m not able to get lock with GPS.