Hello. I need some help. I am using Pixhawk V6X flight controller and Neo 3 M9N GPS in my quadcopter. When I armed at starting my drone make stable flight up to 40 m. But after that it get disarmed from 15m height. But it not cause any external damage to the hardware. After that when I reconnect power supply my GPS and flight controller not working and when I connect it with Mission Planner it shows message Config error and then reboot. As I am flying my drone in College campus which is a government Institute and comes under Yellow zone hence may be my GPS get locked. Also there is another interesting thing is that when I am connecting Pixhawk with power supply its FMU LED is Blinking at very fast rate for around 4 seconds in blue color and then goes off. I cant understand what it is indicating. FMU LED is single rectangular LED present near SD card slot (not 3 LEDs)Please give me solution how can I start my GPS and flight controller again.

Some people had that “config and reboot” error with Cubes too, and I think the fix was to eject the SDcard, do the firmware update, or bootloader update, and afterwards put the SDcard back in.
Otherwise you would need to provide a .bin log file for us to know more.
Thank you for your response. Sir Pixhawk v6x flight controller has silver cube. I performed firmware update but still it is not configuring. Sir can you tell me which firmware version I should upload? For more information Log file is attached.
Thank You
(attachments)
00000320.BIN (3.44 MB)
You have the current stable firmware, so that is good.
You have multiple warning messages to start with:
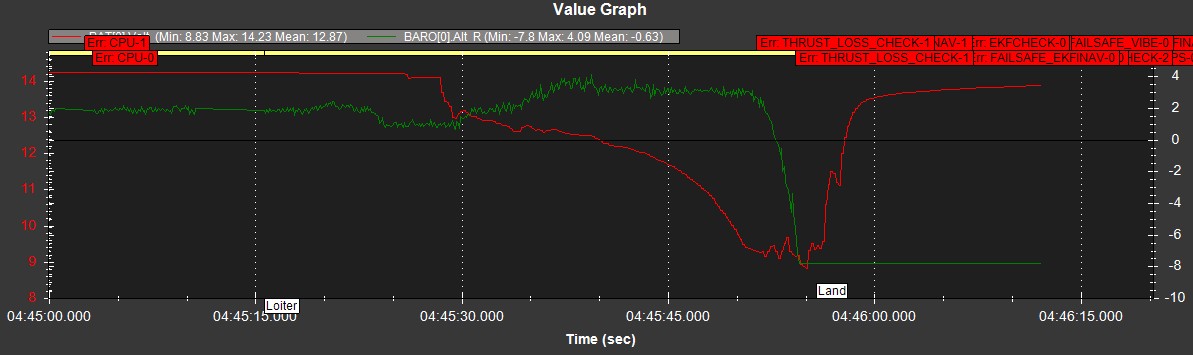
PreArm: Baro: not healthy
PreArm: Gyros not healthy
PreArm: Compass not healthy
then
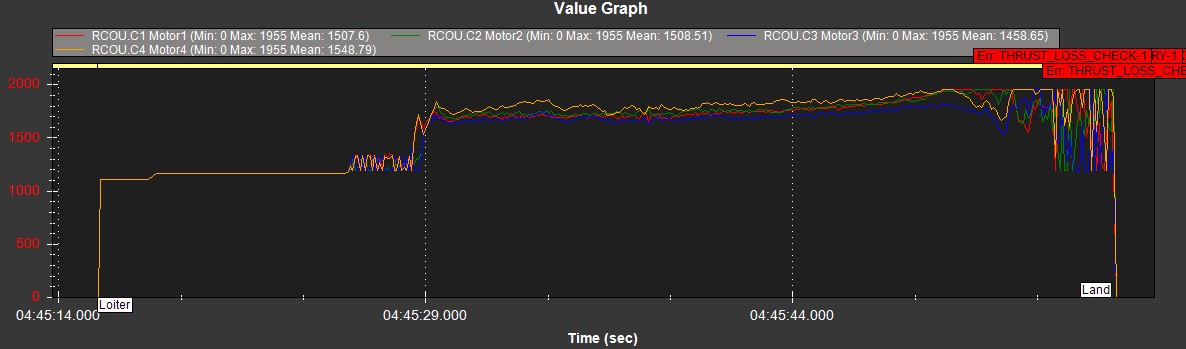
Potential Thrust Loss
Vibration compensation ON
so I would say there is some calibration issues, plus the motors are forced to maximum output without the copter achieving any altitude at all.
You will have to carefully preform the mandatory calibrations and consider the motors and props used.
That flight controller will benefit from doing the temperature calibration procedure.
https://ardupilot.org/copter/docs/common-imutempcal.html
Don’t tie down the copter for testing, just use mission planner motor test for checking motor order and spin direction, then you need to do actual flights. The copter expects to be flying and will not react correctly when restrained.
Thank you sir for your response. Sir I am using Hobbywing xrotor 60 amp 4in1 ESC and GEPRC 2806 1350kv BLDC motor. Sie when I am performing motor test it fails for multiple times. Hence we required to do forced arming. Can you tell me what will be the problem. When I am connecting pixhawk v6x flight controller with mission planner it is not detecting the board. Please suggest me what I should do to perform successful Calibration and motor test
Thank you.
What size props do you have, and what is the total weight of the copter.
There should be no reason to force-arm. You have to work through fixing the issues first.
Ensure MissionPlanner is up to date. Do you see a relevant device in Windows device manager when the flight controller is connected?
Thank you for your response. Sir, the size of propeller is 7 inch Triblade propeller and total weight of drone 2.5 kg. Yes sir when I am connecting flight controller with mission planner, it shows communication protocol and reads all parameters but it does not allow to do calibration and show no movement in graphical window of mission planner
Thank You.
You need to solve the connection and calibration issues first.
If I think of anything related I’ll let you know.
2.5kg is a lot of weight for 7 inch props - I doubt it will fly.
Sir problm is that my pixhawk v6x is not performing calibration and it’s cube fmu light is flashing rapidly so I can’t understand what is a problem and how to solve it
Shawn is right that this craft will likely not fly.
Maxed out motor outputs and a sagging battery.
You also have CPU errors. Try connecting to QGroundControl and re-flash the firmware. Then be prepared to re-buld this craft with a proper thrust/weight.
Perhaps CUAV has something to say about that. @cuav_le
The FMU LED functions as a bootloader indicator and controller LED. A quick 4-second flash means it’s running the bootloader; then it stays off, which means it failed to run the firmware program. You can try updating the bootloader and firmware.
OK, so download the " arducopter_with_bl.hex" file from this link
https://firmware.ardupilot.org/Copter/latest/Pixhawk6X/
And use MissionPlanner or QGC to flash a custom firmware (the file you just downloaded) - it’s not really custom but that’s the way it’s phrased in MP and QGC.
Error occuring while uploading " arducopter_with_bl.hex" file. I tried to upload it lot of time, but it shows same problem, Board is not detected and Config error and then reboot. Would you please guide me How can I proceed step by step
(Attachment video.mp4 is missing)