Hi - I am trying to run my opto-insulated ESC’s from Radiolink Pixhawk PX4. To provide power I am using a KDE UBEC UAS22 , with jumpers set to 6v. However, upon plugging into PX4, all PX4 LEDs go off and I can no longer communicate to pc via serial. Disconnecting from UBEC restores the normal PX4 behavior , but I am stuck as I really need to provide the ESC with power to start the motors. Any hints are aprechiated (PS.: If I power the ESC through the UBEC on RC receiver (disconnected from PX4), the motors run - which seems to indicate the UBEC is ok ?
Hi,
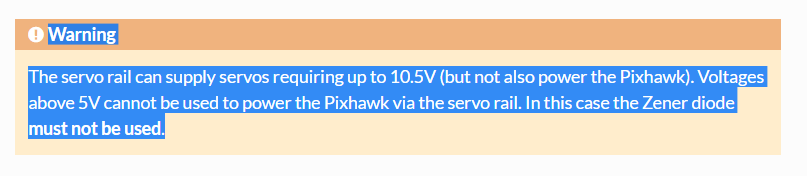
according to the docs I found Pixhawk cannot be powered above 5.7V via the servo rail.
Take a look at the following - maybe it helps you:
If you want to read the full text (I would suggest that) look here:
http://ardupilot.org/copter/docs/common-powering-the-pixhawk.html#common-powering-the-pixhawk
Sounds the solution might be as simple as configuring your BEC to provide 5V (which is what I do).
Christian
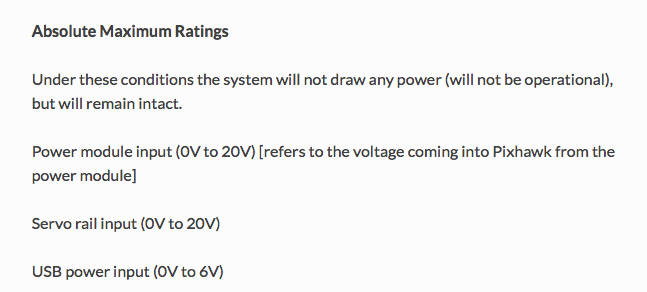
Well-this doc is what seems to contradict within itself - when the max servo rail input is spec’ed 0…20V. Also, there seems to be a differentiation between when 3DR power module is connected and when not (which seems to be prioritized for Pixhawk board powering when present.
OK-I figured it. 6 V is too much. Have set the UBEC to 5V output and things power up as expected. Looks like I now better use the Zener diode to operate safely.