Hi,
I built in a PHL V2 in my quad now…
All works pretty fine, BUT when flying very fast in AltHold or PosHold the aircraft looses high!
Slowly but constant…
Barometer got no errors and it is isolated by foam.
Vibrations are very low.
Thr_mid is calibrated and defined well at 450.
Today I filled up the whole frame inside with foam for a test…
There was no difference!
Still…when I give full throttle to roll or pitch the quad is holding altitude for about 20m and then it goes slowly down…
When releasing pitch or roll stick the quad comes up to the altitude it started from.
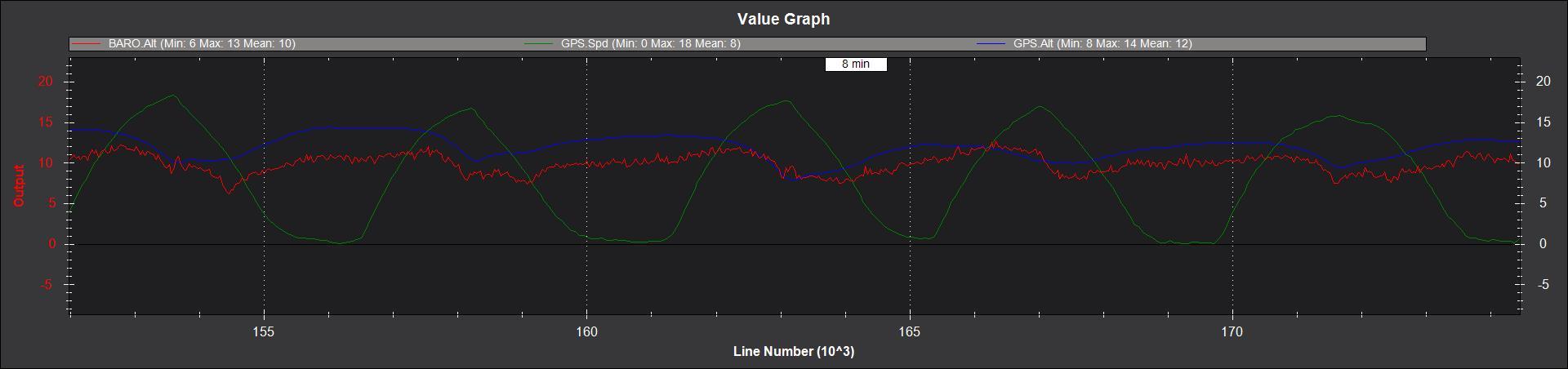
You can see that in my picture from todays logging.
This is pretty typical behaviour, the vehicle forms some kind of pressure bubble when moving fast. I think it is heavily dependent the overall frame shape.
I guess it must form a low pressure zone (behind a high-pressure wake?), which looks like it is higher than it should be, so it decends to get the pressure back up. When it stops, the pressure now looks too high (low alt), so it moves back up again.
Thanks Jim!
Hmmm… not sure thats the same issue…?
In my case the quad is losing altitude in every flight direction, forward backward left right…
And I never had such problems with APM controllers.
Does your copter actually have enough power to fly forward at 45°?
My thr_mid is 330 and it only has just enough power to do 45°.
Check if any motor is maxxing out in rcou
Tried 25° angle…forward backward is much better, but on roll it´s still a problem.
But 25° is poor.
I will look out for some 16" props and give them a test…


{kind=link}