Hi all,
First of all, I’m a newbie to multicopter but I think I have a not so bad understanding of it  I have a x550 frame from Hobbyking (quadcopter) and Pixhawk (chinese copy). I already did several flights with it and it flights pretty well. But today, I had a really bad crash (my first).
I have a x550 frame from Hobbyking (quadcopter) and Pixhawk (chinese copy). I already did several flights with it and it flights pretty well. But today, I had a really bad crash (my first).
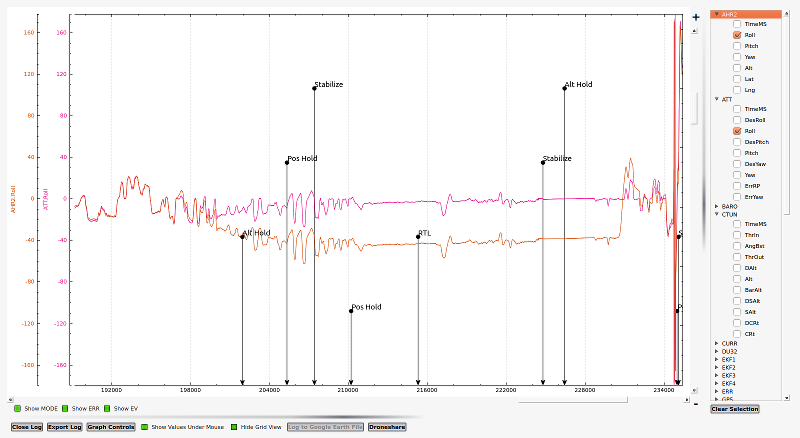
After takeoff, I switched to AltHold, moved a bit forward/backward and left/right but suddenly, my quadcopter started to roll to the right (more and more). Full left on my transmitter did not help. Switching back to stabilize didn’t allow my to save it and it crashed at ~60 km/h on a tennis court. Fortunately, it was late and nobody was playing but this could have turned quite bad 
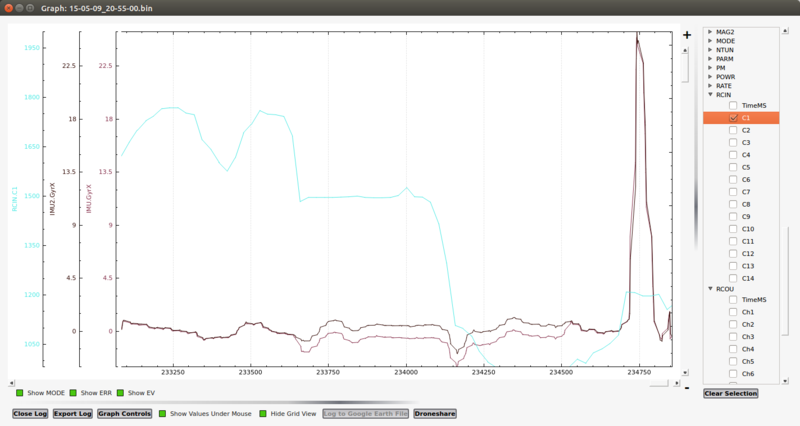
Looking at the logs, I see that just before the copter starts to drift in an uncontrollable way, GyrX of IMU and IMU2 show inconsistent behaviour (around log line 7600): one increase, the other decrease!? Does anyone have an idea how and/or why this could happen?
Also at around 8600, AccZ starts to go crazy. I have seen this already once in one of my first flight in Auto Mode. At that time, the consequence was that the copter started to put full throttle and climbed pretty fast. Switching to stabilize, I was able to take control again. This could be because of high vibration on my quad at full throttle since plotting CTUN.ThrOut and IMU.AccZ show some correlation.
What worry me most is the reason why my quadcopter suddenly started to roll to the right in an uncontrollable way. Since I’m new to all of this, I don’t have enough experience to find a good explanation. Can anyone give me some pointers?
Here is my dataflash log: drive.google.com/open?id=0Bw0Ex … authuser=0
P.S. I remember having a similar issue during my first or second flight. The quad started to roll to the right. I was at very low altitude and was able to land without issue. I remember having unplugged/plugged the battery to reset the board and everything was fine again.
P.P.S. Today, I plugged in the battery with the quad on stable ground. Once the blue/red/white led blinking was over and the quad was acquiring GPS, I pressed the arm button of the Pixhawk and the I moved it to a different place, some meters away. Once GPS was acquired (green led), I armed and took off. Can it be that the gyroscopes were not completely calibrated when I moved the quad? I don’t think so since the first part of the flight does not show any inconsistencies.
 My Pixhawk seems to be rock-stable now, no more gyro inconsistencies and no more leans during flight.
My Pixhawk seems to be rock-stable now, no more gyro inconsistencies and no more leans during flight.