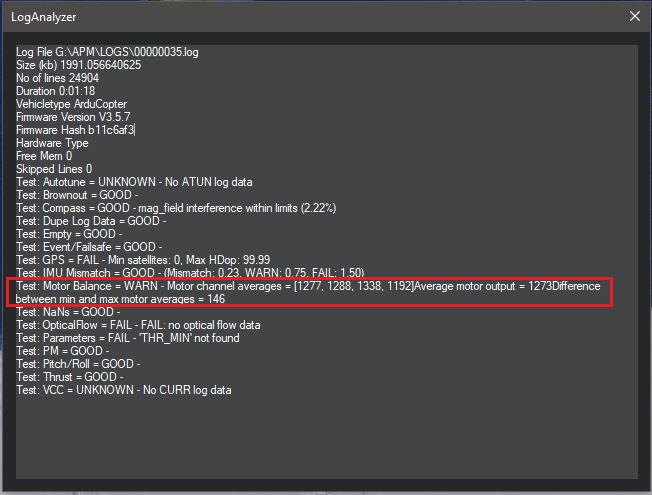
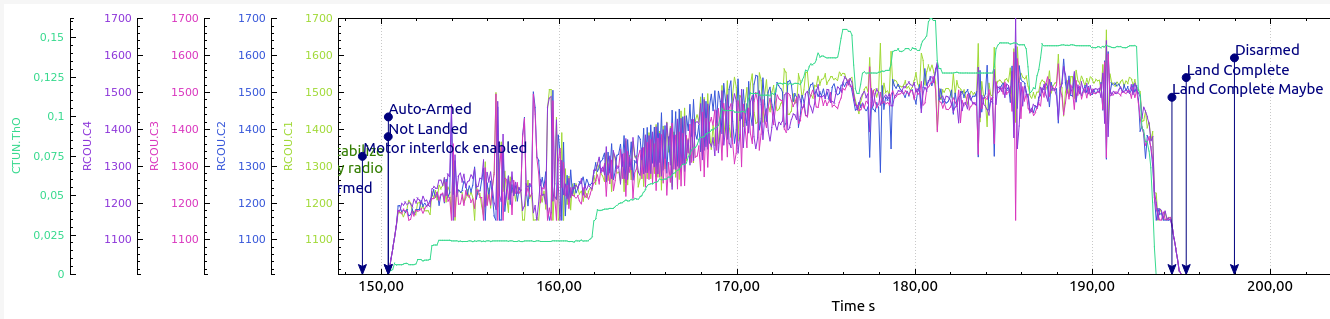
We built a quadcopter for research and development purposes. We turned on all failsafe parameters and checked all sensors calibrated correctly quadcopter was on a flat level and gps was working fine. First problem was when we started motors, there was an imbalance and when the throttle was at %40 third motor was stopped. Then I checked pwm outputs with an oscilloscope and confirmed the different pulses at stabilize mode. Later on we decided to fly with a telemetry module to see the problem still consists. We set the mode Loiter and altitude 2.5m. Led on pixhawk was green(3D lock 11 sat) and we pressed take off. Quadcopter took off to 3m and went outside the field without any user input and crashed. When we checked the logs GPS was no good and motor balance was bad. Should I understand that flight controller is broken or is it from the software? Appreciate for any help.
There are a few possible explanations, but without a flight log it is just speculation.
A 3D lock does NOT mean Loiter will be operational.
I have tried to get the dev’s to look at this but it apparently is too trivial or too hard.
Before you take off, having a 3D fix, and before you arm, with the green LED flashing, change to Loiter mode.
If the EKF is not happy with the 3D fix the LED will revert to blue.
So having a 3D fix does not automatically mean your loiter will work, and that is what it sounds like.
took a look on log 35, the biggest file, contained no flight.
you should not expect perfectly equal PWM to motors unless it’s perfectly level - I mean… “impossibly perfect”
if everything looks/is right , lift it off, - only actual flight can tell.
now I see the videos, the pixhawk is on the table
Seriously, read up on control theory, you can’t expect the PIDs to calculate “perfectly equal” output while they are not actually influencing anything … unless you do a SITL or HIL simulation that feeds it with sane data…
The test you did - for whatever reason - cannot and will not produce simply equal PWM to all motors, if nothing else, because the device is not perfectly level. I mean : 0.0000000000rad level
We tested again made calibrations. Compass was calibrated succesfully but on the fly it gave warning on auto-analysis. Drone took off carefully. So far seems good.
Thanks.