Hi all, I have a problems with a Pixhawk, because it doesn’t generate properly the PWM signal to the ESC/Motors.
The drone components are:
Pixhawk1 (upgraded to 3.5.3 release, although I have the same problem in 3.4.6) with Mission Planner 1.3.4.6 or QGroundControl (MOT_PWM_type=0, MOT_PWM_MIN=0, MOT_PWM_MAX=0, RC3_MAX=2006, RC3_MIN=982, MOT_SPIN_MIN=.015, MOT_SPIN_ARM=0.10, MOT_SPIN_MAX=0.95)
Frame: Tarot 680 (Hexa motor)
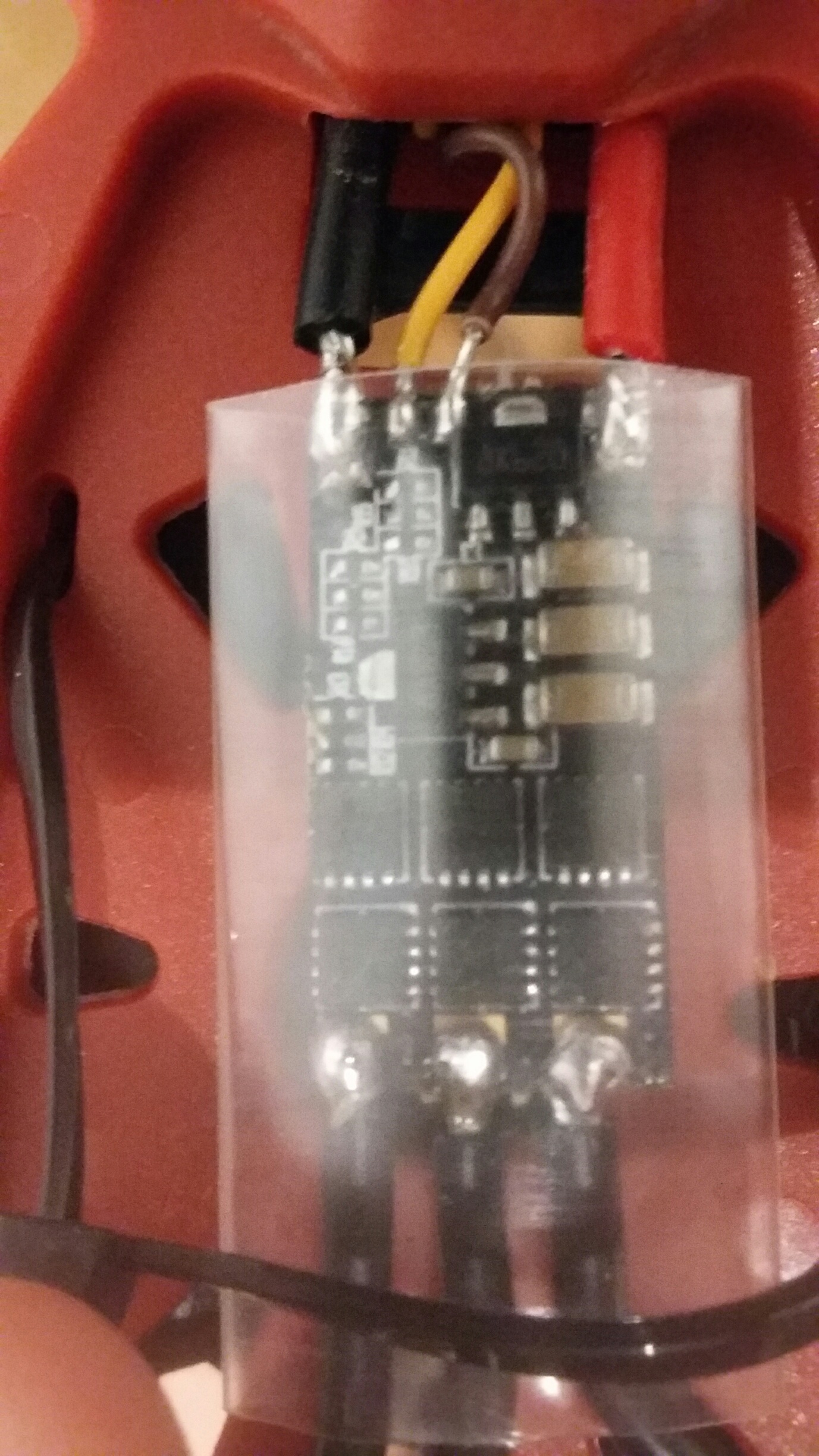
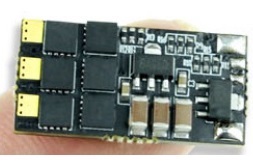
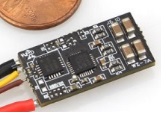
ESC: 6x EMAX Lighting 30A BLHeli
Motors. 6x EMAX MT3510
When I power the Pixhawk and press the safety button, then 4 motors (motor 3,4,5,6) start spinning (2 of them constantly and 2 of them start/stop). Theoretically no motors should spin because the drone is not armed yet.
Once I arm the flight controller, then only 4 motors start spinning constantly (motor 1/2 doesn’t spin). Then the only way to stop all the motors is press again the safety button (motors continue spinning when only I disarm). Due to this failure, I have not been able to calibrate ESC through Pixhawk and also the buttons in “motor test” section in Mission Planner doesn’t do anything (even “stop motor” button is not stopping motors).
I discard any problems in the ESC/motors because I can calibrate ESC connecting them directly to the receiver and once calibrated the motors works fine.
Could it be a hw failure? is there something I could do just to debug?
Some ESCs have been reported as not working with Pixhawk.
The Pixhawk should work with every ESC that works with a normal RC receiver (because it sends the same type of signal) but there is one known exception, the EMAX ESC.
In most cases problems are due to incorrect wiring. Always connect signal and ground. Check your ESC type to decide how to connect the +5V line. On APM2.x you could get away with using the power ground as the signal return with the APM but for Pixhawk you must connect both the signal and the signal ground in order to make the ESC work.
Have you set the frame type correctly to a hex? You have to do it manually in 3.5.3
Why is MOT_PWM_Max set to 0?
MOT_PWM_MAX: PWM output maximum
Note: This parameter is for advanced users
This sets the max PWM value in microseconds that will ever be output to the motors, 0 = use input RC3_MAX
Range Units
0 - 2000 PWM in microseconds
================================================
I would start all over again from scratch. Load arduplane to erase parameters and then reload Copter and go through all the calibrations. But remember to set your frame type.
Hi Mike, I did all you mentioned (set again frame type hexa x, change MOT_PWM_MAX/MIN, start from scratch…) and I got same results. The problem continue there. The only explanation is the EMAX ESC incompatiblity.