But with this configuration the external compass is not detected anymore, any idea why it’s not working?
I have the latest arduplane stable release (3.9.8 on ChibiOS)
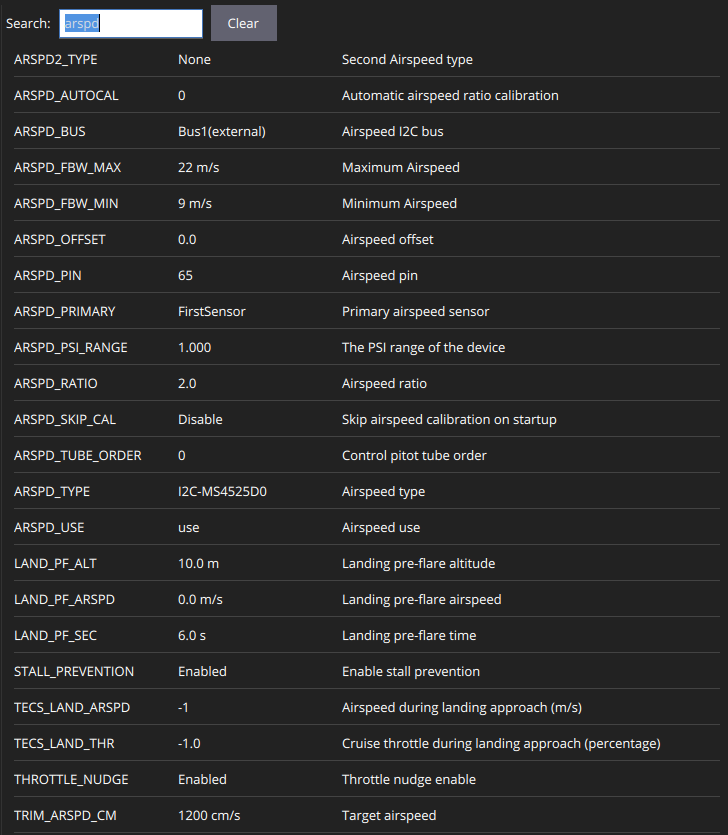
Also I’m using Qgroundcontrol for the configuration and I tried plugging the airspeed sensor only without splitter and setting the ARSPD_PIN to 65 but I don’t see any data related to airspeed on the interface or any new sensor, how can I check that it’s working?
I’m not using mission planner, I’m using QGroundControl (I’m on linux)
But I set the option ARSPD_USE to 1 and ARSPD_TYPE to I
2C-MS4525D0 both are correct for this airspeed sensor
I’ll try to switch the cables if needed but I’d like to know first where can I see the airspeed data in Qgroundcontrol because maybe it’s working but I have no idea
Disconnect the compass from the splitter and see if you get airspeed readings. If so you have a weird address conflict. Compass and Airspeed are usually on different addresses.
The most likely explanation is a bad cable connection though.
Not sure about QGC as I use MP. But airspeed should be very visible.
Only way to know if working ok is to probe the module with an I2C tool
As with conflicting I2C bus, I experienced some issues with termination resistors on a star configuration, in a particular case I had to daisy-chain the modules
I’m currently only testing without the splitter, I can’t get the airspeed sensor to work, the cables were completely wrong… The 5v cable was on the clock and vice versa. I put them back how they should be but still nothing…
Any chance I fried it by getting a wrongly mapped cable?