Quad with cube orange, ArduPilot 4,0 with 4s 5200mah Lipo had thrust lost and fell about 30 feet , with minor damage, Have Made serveral flights with no obvious problems Anyone have information about thrust lost , the cause or fixes
Motor failure, ESC failure, prop failure.
this link should be log file for thrust lost
https://drive.google.com/file/d/1Xw89q0jLdjxjESgdC373EmwRI0zo_xe9/view?usp=sharing
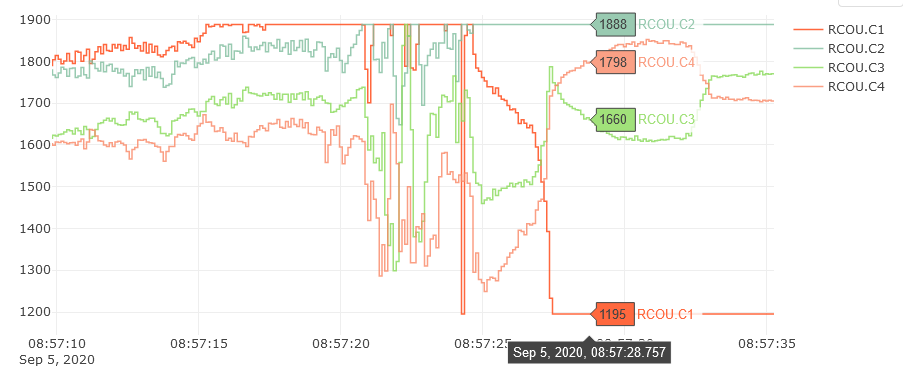
You can see at first Motor1 and Motor2 (CCW) have a generally higher output that 3 and 4 (CW), indicating there’s a problem with motor mounts being twisted causing a physical yaw bias that the flight controller is fighting.
Motor1 (or ESC) fails or has reduced output (RPM ?) and is driven to maximum PWM by the flight controller. Motor2 soon follows the same fate, but it seems to lose all thrust. Then even Motor1 output is reduced to counter the total loss of thrust from Motor2. Motor1 must still have been providing small amount of thrust.
You’ll have to fix the yaw bias first, then check the motor and ESC ratings.
The Motors and ESCs are losing effectiveness because you are running out of battery voltage. That is a serious dive in battery voltage and it will be junk now - use it only for bench testing.

I highly recommend you set up the BATT_LOW , BAT_CRT and BAT_FS parameters before attempting any more flights.
Use this spreadsheet to help - probably treat the suggested settings as mandatory.