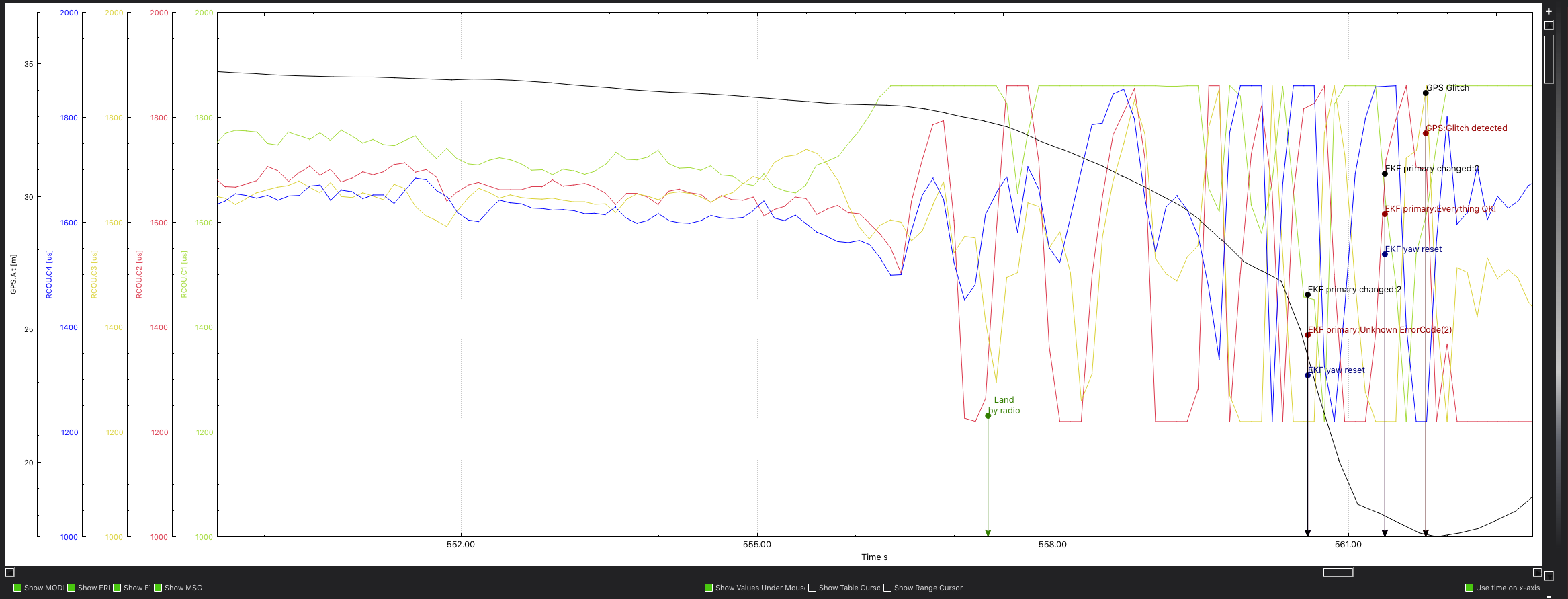
The tune means Pitch and Roll are almost out of control the whole time, maybe because of the wind evident in that video. Since this craft is fairly unstable I’m guessing this is near to the first flight. Best to wait for a windless day - once it’s fully tuned and got up some good solid flight time, it should be able to handle high winds then, otherwise avoid wind.
There shouldn’t be any need to do calibrations before each flight - which are you doing?
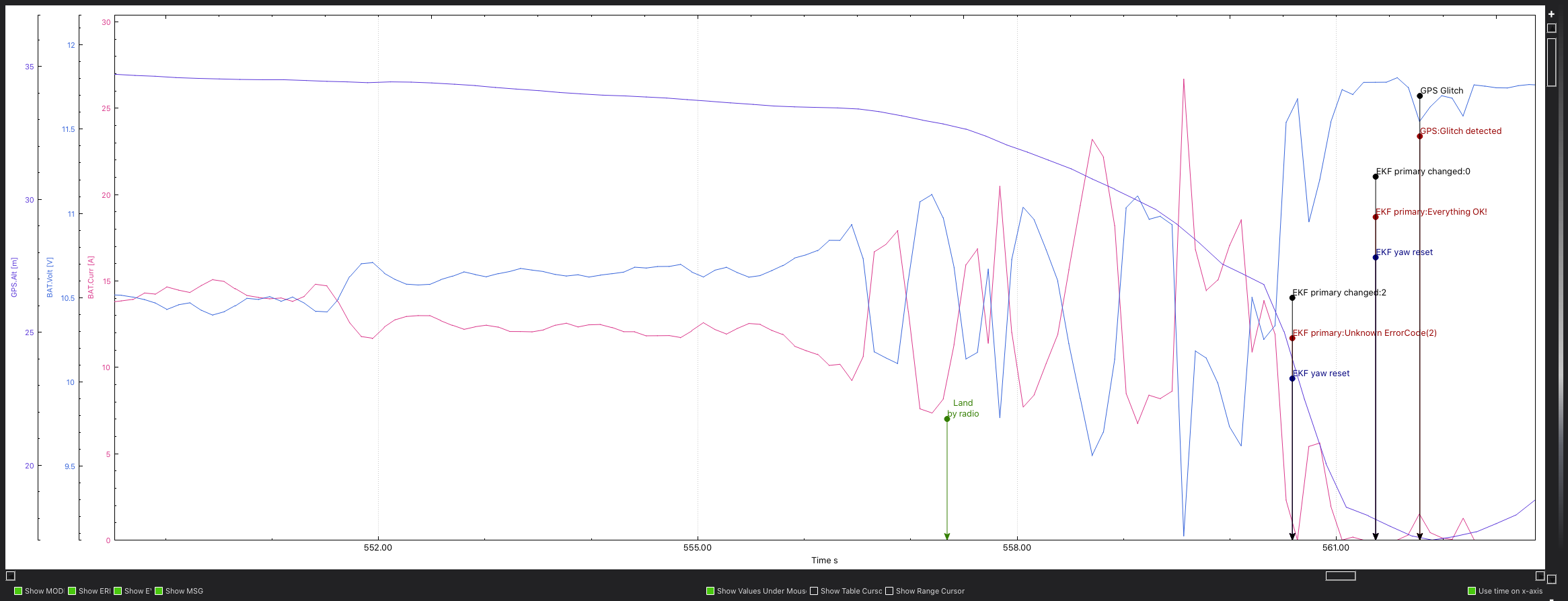
If your battery voltage monitoring is correct, the battery voltage drops to almost nothing (10.5 for a 3cell LiPo) almost as soon as you fly. Are you using LiPos or something else?
If you are using a 3cell LiPo, set these and fix the voltage monitoring - or replace that battery.
BATT_ARM_VOLT,11
BATT_CRT_VOLT,10.5
BATT_LOW_VOLT,10.8
MOT_BAT_VOLT_MAX,12.6
MOT_BAT_VOLT_MIN,9.9
You can set these right away too, although not critical:
PSC_ACCZ_I,1.08
PSC_ACCZ_P,0.54
If you’re certain the voltage and current monitoring are correct you can do the Compass/Motor calibration - carefully! Also you might wont to try setting this since you’ve got a CAN GPS and Compass:
BRD_BOOT_DELAY,5000
Some have found it improves the reliability, allows the CAN devices to boot up and be ready before the flight controller.
For your initial testing and tuning probably check and set these too, just to be safe:
FENCE_ACTION,3
FENCE_ALT_MAX,50
FENCE_ENABLE,1
FENCE_RADIUS,100
FENCE_TYPE,3
You wont be able to arm until there’s a good 3D fix, even if just using Stabilise or AltHold.
Set this to soften your RC control a bit:
ATC_INPUT_TC,0.22
Set these to get the basic tune under control so you have a chance of moving on to Autotune:
ATC_ACCEL_P_MAX,80000
ATC_ACCEL_R_MAX,80000
ATC_ACCEL_Y_MAX,10000
ATC_RAT_PIT_I,0.120
ATC_RAT_PIT_P,0.120
ATC_RAT_PIT_D,0.00324
ATC_RAT_RLL_I,0.120
ATC_RAT_RLL_P,0.120
ATC_RAT_RLL_D,0.00324
If it’s still unstable reduce all those a further 10%
Autotune one axis at a time, unless there’s a bit more stability and you can be more certain of that battery. You’ll need a much bigger area and well away from any other people.
This is the guide you need:
https://ardupilot.org/copter/docs/tuning-process-instructions.html