I was going to add this to the end of a previous post about a crash but felt it needed a new topic.
OK, this problem is getting deeper and more insidious the more testing I do.
Today I actually had the Pixhawk crash on me while ground testing. Not the copter, the Pixhawk flight controller.
This I have never encountered before.
First thing I needed to find out today was why Loiter was being refused.
Nothing in the logs that tells me, and nothing on the GCS (Mission Planner).
So I set the copter up minus props, first in the workshop where I could get expected results and in 2 locations outside.
As expected, indoors especially, it refused to go into Loiter with no messages on the GCS, only Loiter requires 3D Fix, which is expected inside. Outside with 17 sats and a HDOP of 0.6 it refused Loiter with the 2 tones from the beeper but no messages on the GCS.
By this time I had it sitting in the back yard for good reception and it was still refusing with no feedback as to why.
It was only when I switched to Loiter while disarmed and tried to arm that I got the message ‘PreArm: GPS Horiz error 6m (needs 5.0)’.
Nothing could coerce it into Loiter.
While it was in a clear area I started switched to Auto (no props remember) and immediately received the message on the GCS ‘Auto: Failsafe Terrain data missing’.
I do not have Use Terrain Data turned on, in fact I went into Params, set it to On and then set it to Off to be sure.
So auto is not selectable.
Now while I was doing all this switching the copter was in the back yard and I was in the workshop with the RC Tx and Laptop running Mission Planner, while keeping an ear on the error beeps from the copter.
At some point in between arming in Stabilise, switching to Loiter and Auto and disarming in all manner of combinations, the GCS stopped displaying any more messages and I heard no beeps from the copter.
The radio was still a solid green connection to the copter but no data was coming in.
On investigation I found the following:
1: The battery still had 45%
2: The motors were beeping
3: The Safety Switch was a solid red
4: No RGB LEDs were active
5: Although pressing the Safety Switch produced the right change in the switch light, 3 flash sequence, press again, back to solid, the motors continued to beep.
6: No telemetry was coming out.
7: Unplugging the battery and plugging it back in brought everything back to life.
8: No amount of mode switching after that could reproduce the FC crash.
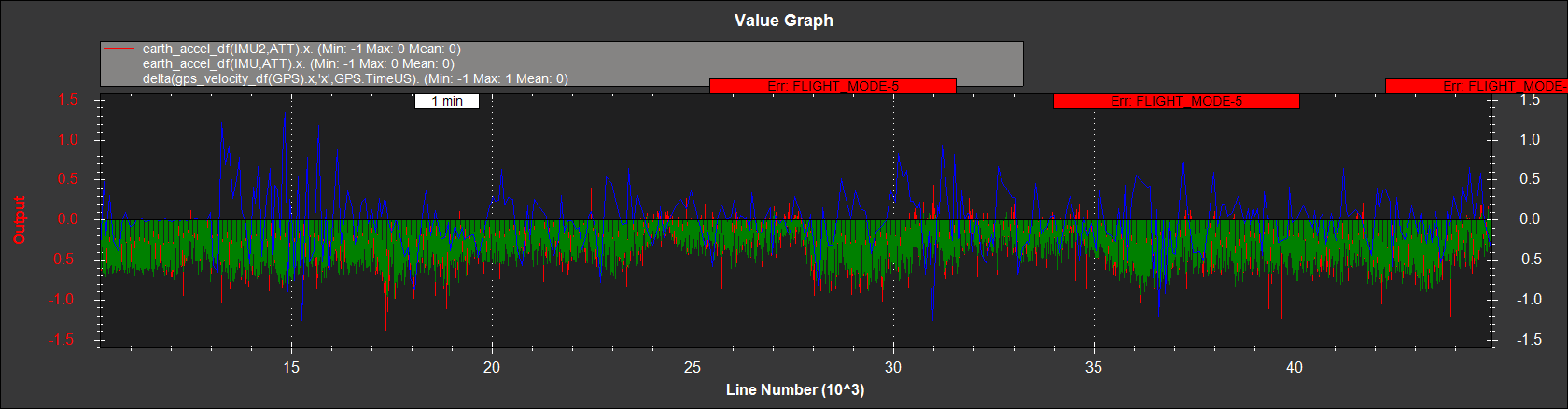
I should mention again that we are using a Septentrio GPS with the protocol switched to SBF.
This is the only change made from when the copter was originally flight tested and it flew quite well with FW 3.3.3
3DR Pixhawk w/Crius HV Power Module
BEC into output rail w/Zener over voltage protection
MavToHOTT telemetry module in Comm2
Septentrio RTK GPS
Graupner Tx and Rx
T-motor U5 motors w/T-Air 40A ESC’s
T_motor 15x5 Props
1000 size Octo frame
6S 22000 battery
RFD900 Telem radios
This is major worry if I can get a FC to actually crash.
And in light of this I am having grave doubts about where 3.4 is actually going.
Can anyone, please, please allay my fears with any information, questions, anything, about what might be going on here.
I cannot in all conscience put copters this size in the air if there is the remotest possibility of the flight FW crashing the processor totally like this.
2 22-09-2016 11-48-24 AM.bin.zip (825.0 KB)