Hi,
I am new to pixhawk and arducopter 3.4. I am testing the copter on ground. what i learnt after arming the copter that the throttle response was not very linear or responsive to transmitter stick movement/inputs. Motor starts with jerk and slow down very late as compared to stick input.
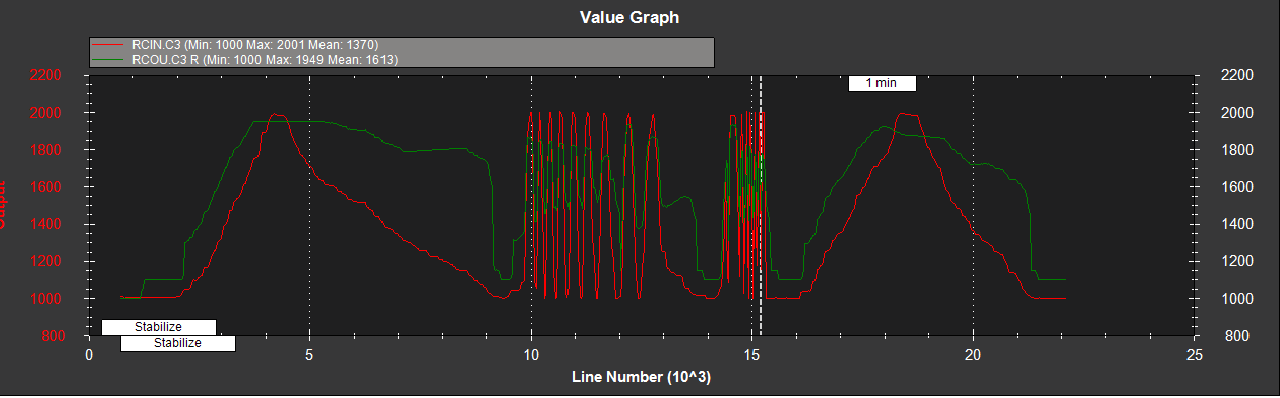
Below is the graph plotted between channel-3 In Vs Ch3-Out
However, when i connect ESC directly to Rx, the motor response to stick movement is very linear.
Motors: SunnySKy 980kv
ESC; Little bee 30A with blheli firmware
This is a different question. Aero, there is a ton of math going on between RCIN.C3 (effectively stick position), and RCOUT.C3 (a single motor PWM output). There is no intention of a close relationship. There are stability and mixer functions, perhaps altitude loops, and the fact that they could be on separately defined scales to name a few reasons.
If you are most interested in how the RCIN.C3 relates to “throttle” or collective, try ThrO in the CTUN log. Be mindful that STAB and any mode using the altitude controller will be quite different. If you have the log and want others to check it out, please share.
After recalibrating accelerometer and by keeping pixhawk perfectly levelled, the throttle respose has become linear and smoother to input.
I think pixhawk wasnt levelled properly when i tested earlier. Now its fine