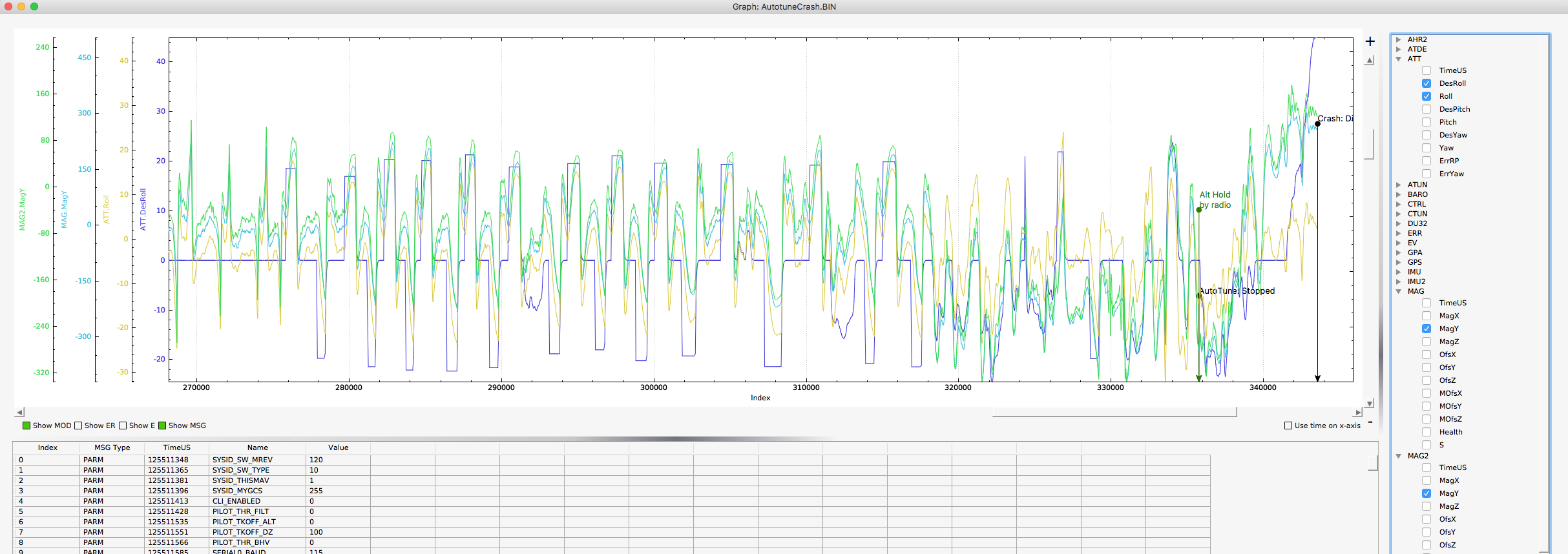
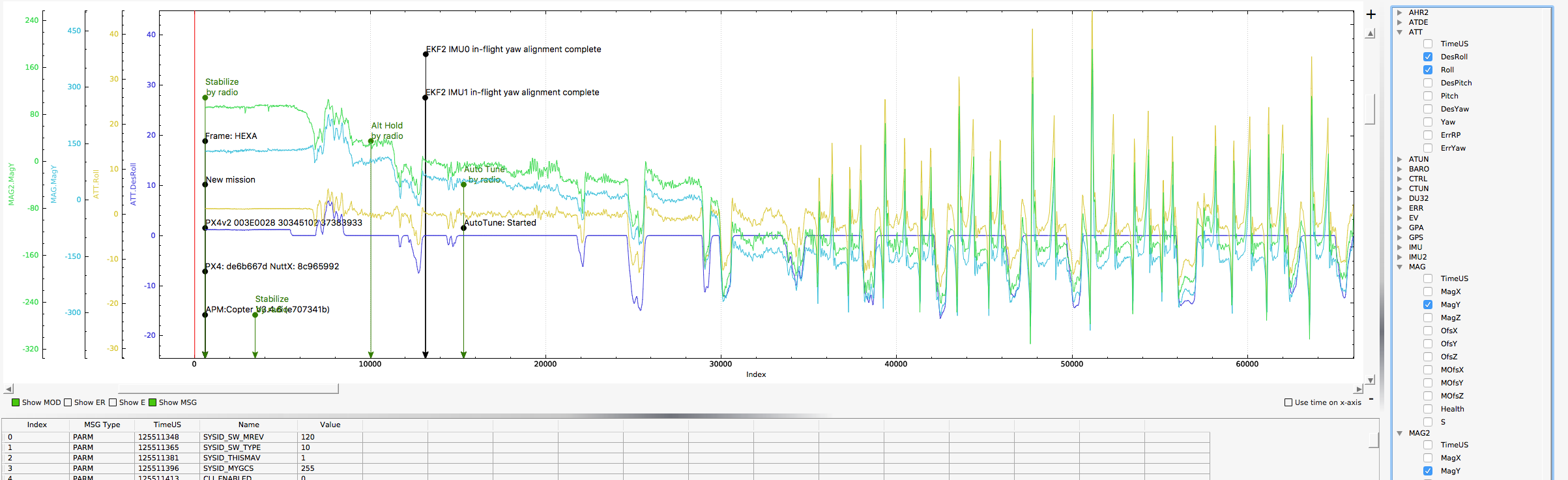
My hexacopter crashed a few days ago and I cannot find out why exactly. It was after I tried to autotune it, I don’t know if it could be the reason. Here is a list of things I found out during the flight and in the flight logs:
1: At the end of the flight, the copter’s roll wasn’t responding at it should have.
2: It disarmed at the end of the flight because the crash check activated.
3: I checked the servo power rail and it seemed fine.
I know why it crashed (crash check), but I don’t know what happened to the roll of my copter for it to fail.
I joined the flight logs via a DropBox link from the Pixhawk and I hope you’ll be able to help me.
Firmware on the Pixhawk is AC3.4.6
No I don’t have a current sensor, because the ones I had weren’t powerfull enough, but I ordered one and it should arrive soon.
I have an Tarot 680 Pro with 33cm long blades. 2 8000mAh 6s were plugged.
No I didn’t do the compass/motor calibration, I wanted to do the autotune first, but next time I’ll do the compass/motor calibration in first.
I pretty much have the default settings and the AUTOTUNE_AGGR is set at 0.1 (agressive), because on the AutoTune page of ArduPilot, it was written to set it at 0.1 to begin.