I thought I read somewhere that rc5 had support for dual GPS but for the life of me I can’t seem to get it to work.
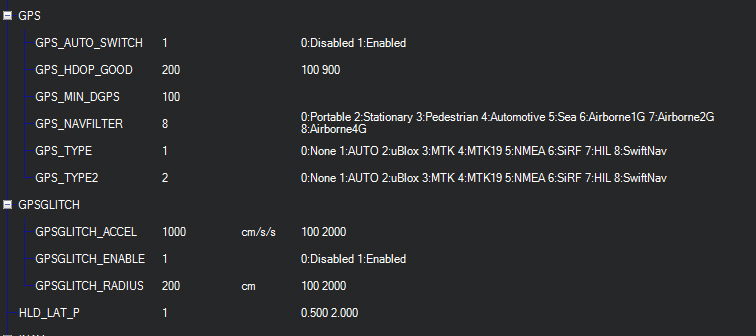
I have both GPS units setup and configured. I went into Full Params and enabled the 2nd GPS [GPS_TYPE_2 = 1] but nowhere in mission planner does it seem to show the 2nd GPS unit.
I seem to be able to switch between the 2 by disabling GPS_TYPE=0 and the HDOP and SAT count change and then GPS_TYPE=1 & GPS_TYPE2=0 and again the HDOP and SAT count changes so to me it seems it is “Seeing” both but nothing else.
I noticed that it seems to work in APM:Plane and there was talk in an older RC that it was there but doesn’t do anything yet.
Is this still the case? Code is there but it doesn’t really do anything in APM:Copter 3.2-rc5?
@thequestor,
Only the primary GPS is displayed in the MP.
To see if the secondary GPS is functional, you must review the data flash logs after a mission.
Regards,
TCIII GM
[quote=“TCIII”]@thequestor,
Only the primary GPS is displayed in the MP.
To see if the secondary GPS is functional, you must review the data flash logs after a mission.
Regards,
TCIII GM[/quote]
Thanks for answering.
But I’m not seeing it in the dataflash logs It only see GPS no GPS2.
Suggest that when the Pixhawk switches from GPS to GPS2 and vice a versa that there be a means of showing operator which GPS is being used. I’d like it to be in the status window and the HUD.
I’m currently setting up my Y6 with a LEA-6H as my primary GPS and Compass and the NEO-7M GPS (only) as my secondary.
For testing purposes as well as situtational awareness, I feel it would help me to understand the behavior of the air vehicle in flight when it switches to one or the other. Not sure anyone else agrees with this, but the idea of knowing what the vehicle is doing is in my opinion important for managing it as well as troubleshooting it later.
 It only see GPS no GPS2.
It only see GPS no GPS2.